Bonjour,
Je m’adonne à la documentation de ma danseuse tandis qu’il fait beau et que je pourrais être dehors. Mais, cette fois, j’ai une bonne excuse puisque nous voilà confinés…
La documentation, ce n’est pas généralement la partie la plus intéressante pour un développeur et je suis sur ce projet un peu, voire très, en retard.
Cependant, avec de bons outils, cela peut devenir un peu plus fun.
J’utilise depuis un certain temps déjà le format AsciiDoc et j’ai migré vers AsciiDoctor pour la génération des documents HTML et PDF.
Ce format étant bien reconnu chez GitLab, mon README s’affiche correctement.
Comme un dessin vaut mieux qu’un long discours, j’y intègre du PlantUML pour obtenir quelques diagrammes en seulement quelques lignes de texte.
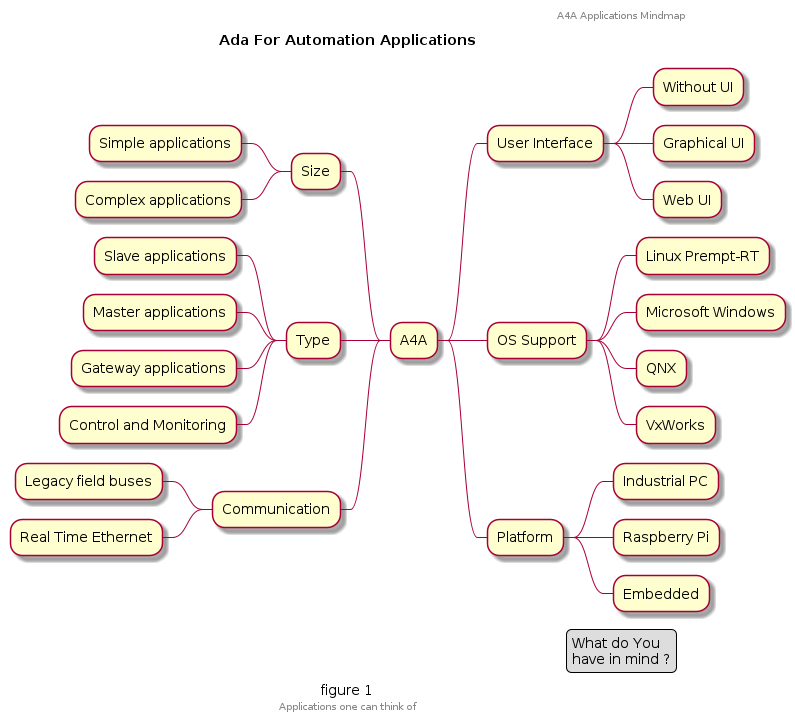
Et notamment, il y existe une syntaxe pour créer des cartes heuristiques ou mind maps ici. Et bien sûr je n’ai pu résister !
J’en ai ainsi créé une à propos des applications réalisables avec Ada for Automation :
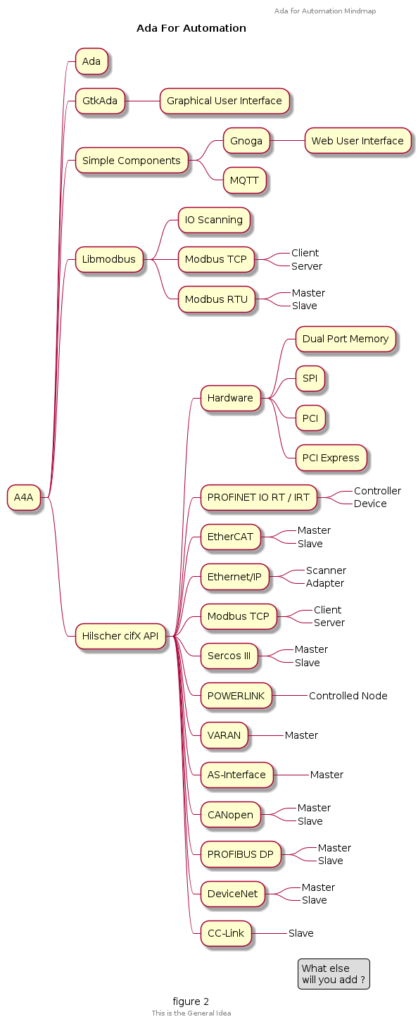
et une autre qui présente le cadriciel lui-même :
Du coup, je me suis aussi mis à documenter les applications de démonstration comme ici ou là.
Cordialement,
Stéphane