Bonjour,
Il n’aura pas échappé à la sagacité de ceux qui étudient le code de « Ada for Automation » que celui-ci a subi quelques évolutions depuis le dernier article.
Cependant, comme les sagaces sont rares, je m’en vais vous les exposer en vrac car on est quand même Dimanche soir.
Donc :
- suivant l’implémentation du Maitre Modbus RTU et de son interface graphique, celle des clients Modbus TCP comporte désormais également une partie visualisant l’état des commandes.
- chaque élément de l’interface est maintenant un objet, -le contenu des pages du carnet, cette orientation objet permettant d’une part une factorisation du code des GUI des applications et d’autre part une personnalisation plus simple de l’interface de chacune. Au niveau de l’apparence ce n’est pas flagrant mais au niveau code ça l’est.
- ces mêmes éléments sont « encapsulés » dans des fenêtres avec des barres de défilement. Pour ceux disposant d’un grand écran, c’est un petit changement. Pour ceux disposant d’un petit écran c’en est un grand. Qui plus est indispensable si les éléments graphiques viennent à croître, par exemple en ajoutant des commandes ou des serveurs.
- comme l’on avait constaté que le fait de bloquer l’évolution de la fenêtre affichant les messages de log sous Microsoft Windows (R) en cliquant et maintenant la barre de défilement bloquait également les tâches tentant d’y écrire, la fonction de log met à présent en œuvre une pile FIFO dans un objet protégé et une tâche dépilant les messages lorsque possible.
- Enfin, le binding du pilote pour les cartes Hilscher cifX a été réorganisé en prévision de son évolution pour disposer d’un paquetage pour chaque technologie de bus de terrain supportée par ces cartes de communication, à commencer par PROFIBUS. Ainsi, l’état étendu pour PROFIBUS Maitre est remonté, pas encore au niveau de l’interface graphique cependant mais on s’y attelle.
Une image pour illustrer le propos :
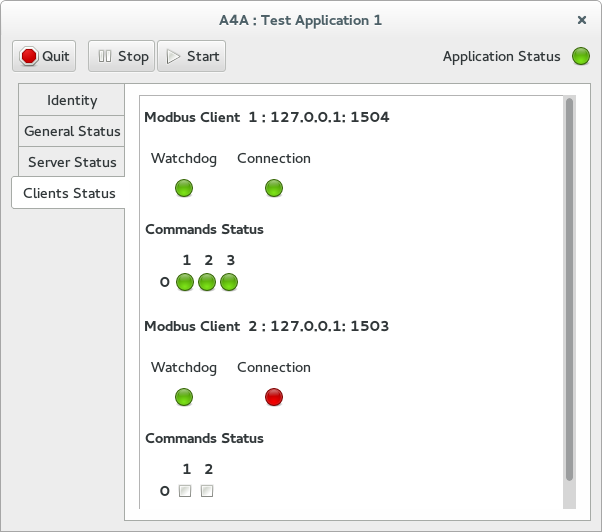
Sur Debian Sid, merci Monsieur Brenta ! 😉
Merci pour vos retours, sur le forum ou par email.
Cordialement,
Stéphane