Bonjour,
Nous avons bien travaillé ces derniers temps sur « Ada for Automation » et nous sommes ravis de pouvoir vous faire part des évolutions suivantes :
L’interface graphique a été relookée en s’inspirant du document :
GNOME Human Interface Guidelines 2.2.3
Notamment, les cadres qui structuraient par trop les vues ont été rendus invisibles, les étiquettes sont maintenant en gras, les items sont alignés avec des groupes de taille, etc.
Vous voudrez bien nous faire part de vos remarques et observations sur le forum, merci d’avance.
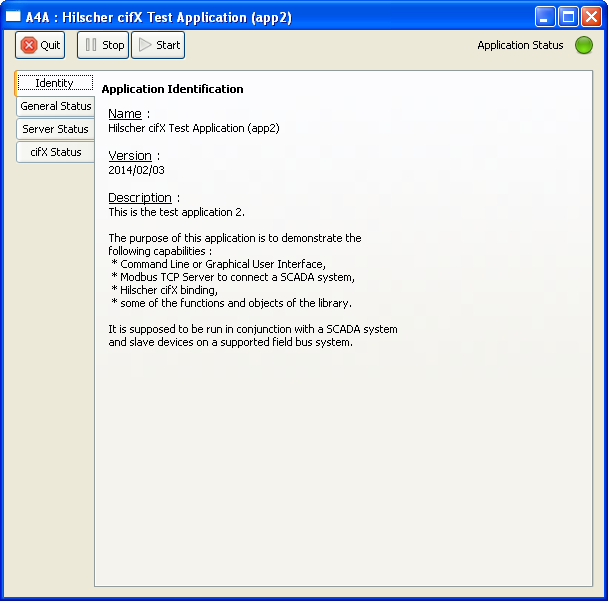
Ainsi la vue « Identity », qui fournit des informations sur l’application, devient :
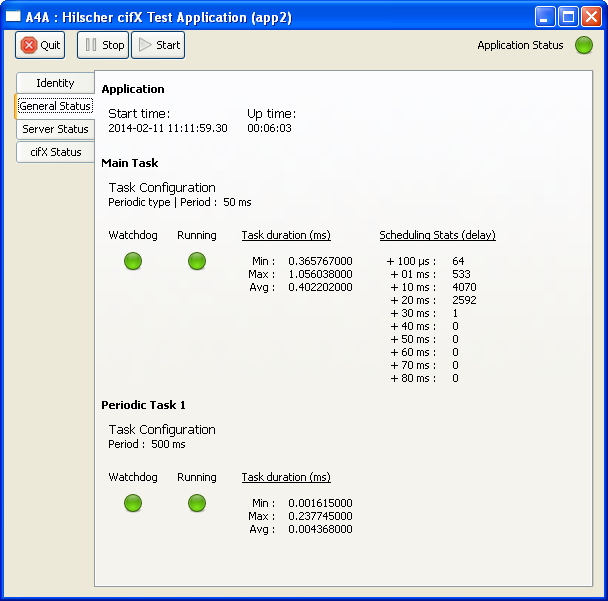
La vue « General Status » donne pour chaque tâche :
- l’état du chien de garde, surveillance mutuelle entre la tâche et l’interface graphique,
- l’état de la tâche elle-même, fonction de l’action de l’utilisateur sur les boutons « Stop » et « Start »,
- quelques statistiques sur la durée d’exécution, Min, Max et moyenne glissante,
- et pour la tâche principale, les statistiques concernant l’ordonnancement, c’est à dire le retard entre le moment où la tâche est censée être réveillée et le réel obtenu.
Le serveur Modbus TCP intégré bénéficie également d’une UI mise à jour :

Le binding de l’API cifX Device Driver, l’interface applicative du pilote pour les cartes Hilscher cifX, s’est étoffé. Ce n’est pas encore tout à fait terminé mais on accède aujourd’hui à pas mal de fonctions comme vous pouvez le découvrir ci-dessous :
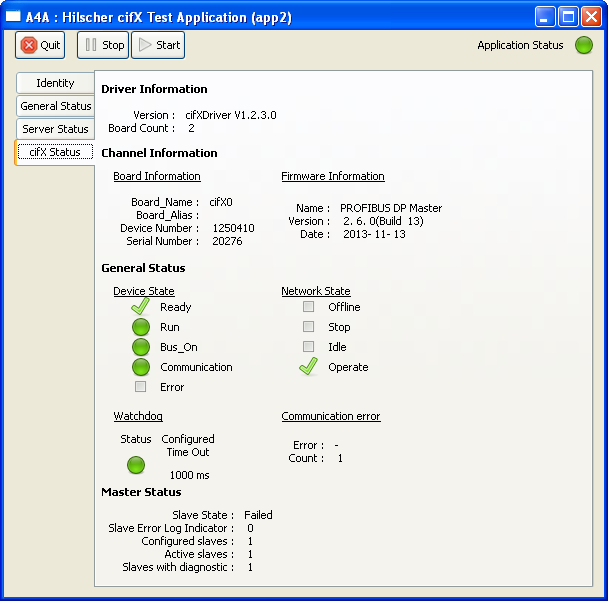
Ainsi l’on peut récupérer :
- les informations concernant le pilote, version et nombre de cartes trouvées sur la machine,
- celles concernant la carte utilisée, le firmware à l’œuvre,
- et enfin les informations concernant l’état de la communication elle-même.
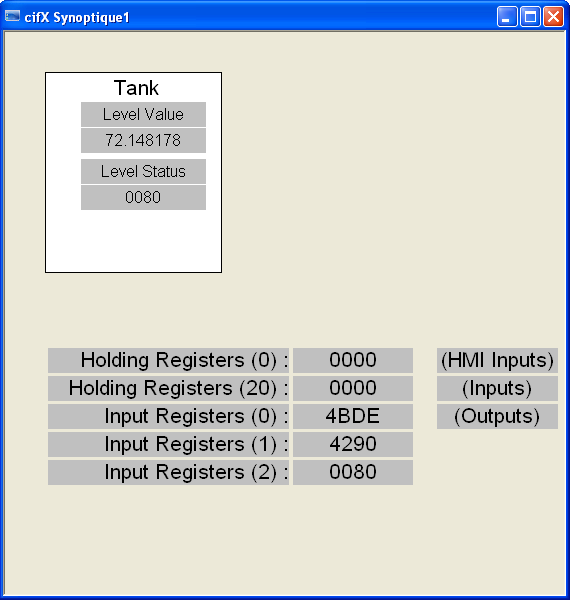
On y voit les informations concernant une carte Hilscher cifX PCI PROFIBUS DP Maitre, une cifX 50-DP/ML donc, et la communication est établie avec le radar de mesure de niveau Endress+Hauser, ce que l’on peut constater dans la supervision pcVue :
N’est-ce pas merveilleux ? 😉
Bien sûr, comme cette interface graphique est commune, l’application exemple App1, qui met en œuvre la scrutation cyclique sur Modbus TCP et déjà décrite dans ces colonnes, ainsi que l’application de simulation App1Simu, se voient elles aussi relookées.

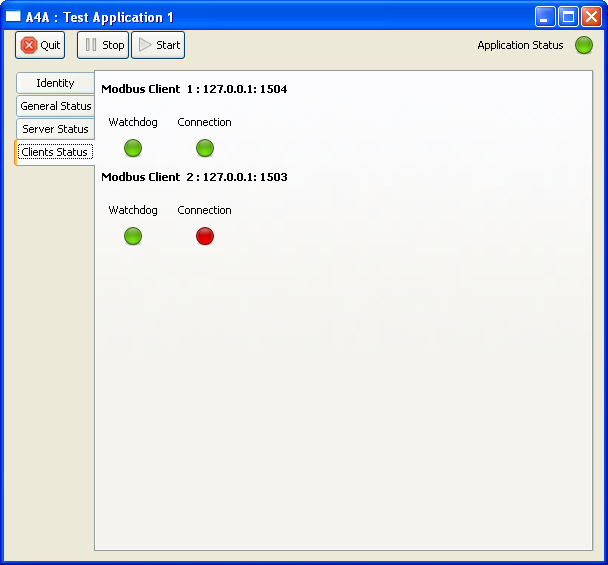
De plus, l’interface graphique pour les clients Modbus TCP, – la scrutation cyclique ou IO Scanning -, est également opérationnelle.
Je profite de cet article pour vous indiquer la sortie en Décembre dernier d’une nouvelle version du DVD pour les solutions de communications Hilscher cifX, comX et netJACK :
Communication Solutions DVD for cifX, comX and netJACK
Vous y découvrirez naturellement de nouvelles versions des documents, logiciels, firmwares, etc… mais également de nouveaux produits dont des cartes cifX munies de deux ports de communication bus de terrain PROFIBUS / CANopen / DeviceNet.
Un document « What’s new » figure sur le DVD dans le répertoire de la documentation.
Cordialement,
Stéphane