Bonjour,
J’ai eu l’occasion de travailler sur un sujet déjà évoqué, le Raspberry Pi équipé d’un SenseHAT, un matériel avec lequel j’ai voulu faire une démonstration de Node-RED.
Node-RED est un logiciel qui permet de réaliser une programmation graphique à l’aide de blocs ou nœuds issus d’une bibliothèque standard qui peut être étendue.
Il existe à ce jour une grande variété de nœuds :
https://flows.nodered.org
Il est aussi bien sûr possible de créer ses propres blocs :
https://nodered.org/docs/creating-nodes
L’exemple qui va suivre montre l’utilisation d’un bloc « Function » qui permet de créer donc une fonction en JavaScript comme expliqué ici :
https://nodered.org/docs/writing-functions
Node-RED est disponible dans Raspbian, la distribution standard sur le Raspberry Pi, ainsi que sur la gamme de produits netIOT Edge de Hilscher.
Un site est dédié à l’offre spécifique Industrial Internet et Industry 4.0 : netIOT – Industrial Cloud Communication
Il existe des nœuds pour gérer le protocole Modbus dans Node-RED :
https://flows.nodered.org/node/node-red-contrib-modbus
Nous pourrons donc développer une application Node-RED au-dessus du serveur Modbus TCP développé en Python et utilisé dans l’article précédent.
Pour réaliser une interface graphique simple, un tableau de bord, il est possible d’utiliser des composants issus de la bibliothèque suivante :
https://github.com/node-red/node-red-dashboard
J’ai repris le code Python pour pouvoir piloter la matrice de LEDs.
Le code ajouté permet uniquement de modifier la couleur de l’ensemble des LEDs via Modbus TCP.
Cela suffit à ma démonstration, c’est plus joli !
# -*- coding: utf_8 -*-
"""
Modbus TestKit: Implementation of Modbus protocol in python
(C)2009 - Luc Jean - luc.jean@gmail.com
(C)2009 - Apidev - http://www.apidev.fr
This is distributed under GNU LGPL license, see license.txt
"""
import sys
import struct
import numpy as np
import modbus_tk
import modbus_tk.defines as cst
from modbus_tk import modbus_tcp
"""from sense_emu import SenseHat"""
from sense_hat import SenseHat
import kbhit, time;
sense = SenseHat()
def main():
"""main"""
kbhit.init();
running = True;
logger = modbus_tk.utils.create_logger(name="console", record_format="%(message)s")
screen = np.zeros((8, 8, 3), dtype=np.uint8)
actual_color_value1 = int(0)
actual_color_value2 = int(0)
actual_color_value3 = int(0)
try:
#Create the server
server = modbus_tcp.TcpServer(port=1502)
logger.info("running...")
logger.info("enter 'q' for closing the server")
server.start()
slave_1 = server.add_slave(1)
slave_1.add_block('0', cst.HOLDING_REGISTERS, 0, 100)
while running:
if kbhit.kbhit():
ch = kbhit.getch();
if 'q' == ch:
running = False;
north = sense.compass;
"""print("North: %s" %north);"""
slave_1.set_values('0', 0, struct.unpack('>HH', struct.pack('>f', sense.temp)))
slave_1.set_values('0', 2, struct.unpack('>HH', struct.pack('>f', sense.pressure)))
slave_1.set_values('0', 4, struct.unpack('>HH', struct.pack('>f', sense.humidity)))
slave_1.set_values('0', 6, struct.unpack('>HH', struct.pack('>f', north)))
out_values = slave_1.get_values('0', 20, 3)
color_value1 = out_values[0]
color_value2 = out_values[1]
color_value3 = out_values[2]
if actual_color_value1 != color_value1 or actual_color_value2 != color_value2 or actual_color_value3 != color_value3 :
color = (color_value1, color_value2, color_value3)
screen[0:8, 0:8, :] = color
sense.set_pixels([pixel for row in screen for pixel in row])
actual_color_value1 = color_value1
actual_color_value2 = color_value2
actual_color_value3 = color_value3
"""time.sleep(0.05);"""
finally:
server.stop()
kbhit.restore();
if __name__ == "__main__":
main()
Avec ce petit bout de code on peut piloter le SenseHAT depuis n’importe quel Client Modbus TCP, comme un automate, « Ada for Automation »…

… ou Node-RED donc :

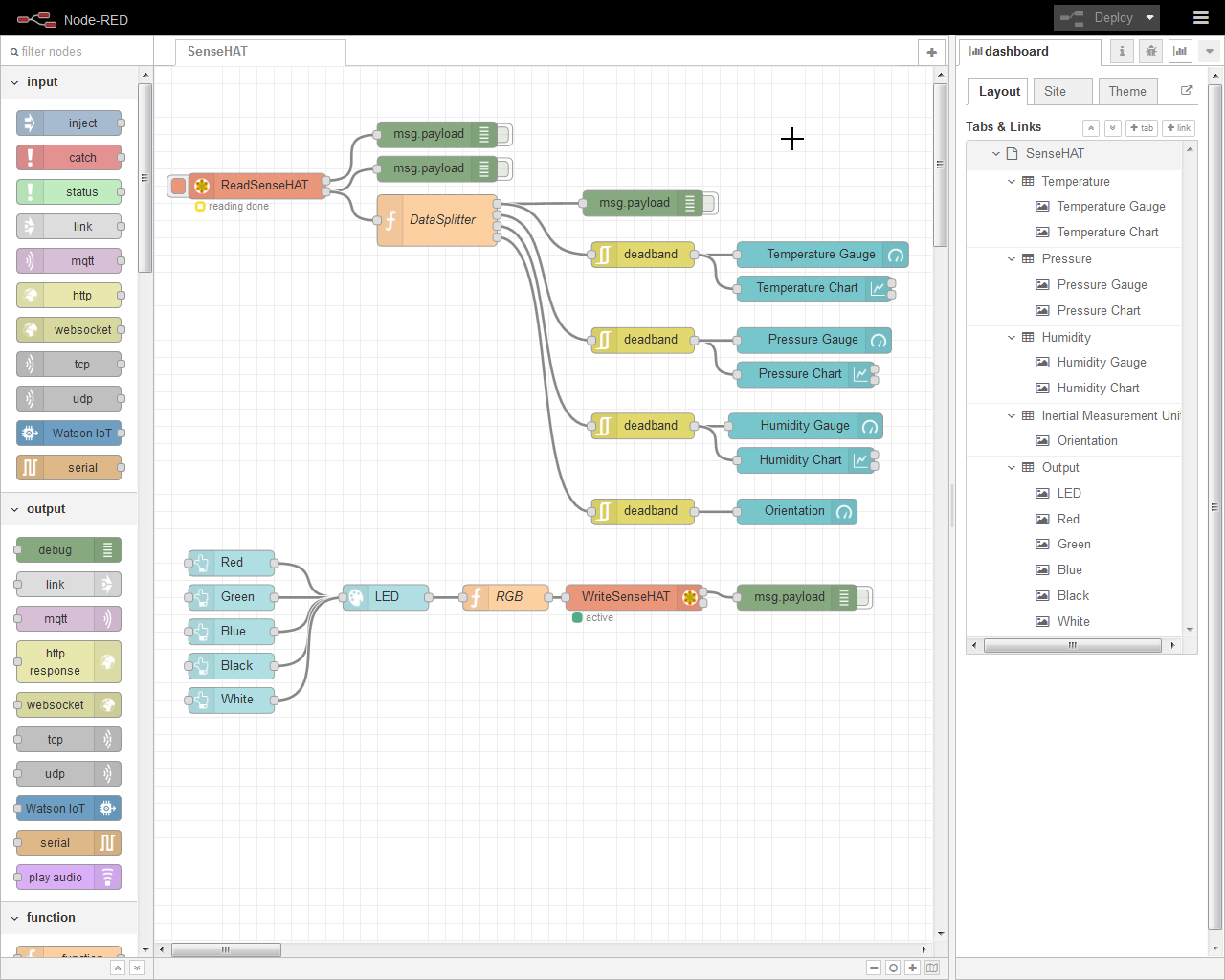
Ci-dessous une vue de l’éditeur Node-RED tournant dans un navigateur, Firefox ici en l’occurrence :
Il est possible d’exporter des portions de programme au format JSON.
Ci-dessous le « flow » exporté dans le presse-papiers et passé à la moulinette pour le rendre joli :
https://jsonformatter.org/json-pretty-print
{
"id": "fd47437e.e21aa",
"type": "tab",
"label": "SenseHAT",
"disabled": false,
"info": ""
},
{
"id": "77438b0a.41299c",
"type": "modbus-read",
"z": "fd47437e.e21aa",
"name": "ReadSenseHAT",
"topic": "",
"showStatusActivities": true,
"showErrors": true,
"unitid": "",
"dataType": "HoldingRegister",
"adr": "0",
"quantity": "10",
"rate": "1000",
"rateUnit": "ms",
"delayOnStart": false,
"startDelayTime": "",
"server": "b96d491a.dcdc78",
"useIOFile": false,
"ioFile": "",
"useIOForPayload": false,
"x": 120,
"y": 140,
"wires": [
[
"4a16a9de.7c964"
],
[
"50d27a17.1ae20c",
"f74fbbe6.028478"
]
]
},
{
"id": "4a16a9de.7c964",
"type": "debug",
"z": "fd47437e.e21aa",
"name": "",
"active": false,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 330,
"y": 80,
"wires": []
},
{
"id": "50d27a17.1ae20c",
"type": "debug",
"z": "fd47437e.e21aa",
"name": "",
"active": false,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 330,
"y": 120,
"wires": []
},
{
"id": "f74fbbe6.028478",
"type": "function",
"z": "fd47437e.e21aa",
"name": "DataSplitter",
"func": "var Temperature = { payload:msg.payload.buffer.readFloatBE(0) };\nvar Pressure = { payload:msg.payload.buffer.readFloatBE(4) };\nvar Humidity = { payload:msg.payload.buffer.readFloatBE(8) };\nvar Orientation = { payload:msg.payload.buffer.readFloatBE(12) };\nreturn [ Temperature, Pressure, Humidity, Orientation ];",
"outputs": 4,
"noerr": 0,
"x": 330,
"y": 180,
"wires": [
[
"9ad2be63.c8adc",
"684f463e.a67e08"
],
[
"2526530a.198c7c"
],
[
"5f81af96.9837a"
],
[
"ddd2a50b.358408"
]
]
},
{
"id": "9ad2be63.c8adc",
"type": "debug",
"z": "fd47437e.e21aa",
"name": "",
"active": false,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 570,
"y": 160,
"wires": []
},
{
"id": "66618513.e64734",
"type": "modbus-write",
"z": "fd47437e.e21aa",
"name": "WriteSenseHAT",
"showStatusActivities": true,
"showErrors": true,
"unitid": "",
"dataType": "MHoldingRegisters",
"adr": "20",
"quantity": "3",
"server": "b96d491a.dcdc78",
"x": 560,
"y": 620,
"wires": [
[
"3941225c.7f078e"
],
[]
]
},
{
"id": "3941225c.7f078e",
"type": "debug",
"z": "fd47437e.e21aa",
"name": "",
"active": false,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 750,
"y": 620,
"wires": []
},
{
"id": "5a82fd29.44ccac",
"type": "function",
"z": "fd47437e.e21aa",
"name": "RGB",
"func": "var msg_out = { payload:[] };\nmsg_out.payload[0] = msg.payload.r; \nmsg_out.payload[1] = msg.payload.g; \nmsg_out.payload[2] = msg.payload.b; \nreturn msg_out;",
"outputs": 1,
"noerr": 0,
"x": 410,
"y": 620,
"wires": [
[
"66618513.e64734"
]
]
},
{
"id": "b461cb2e.d156",
"type": "ui_colour_picker",
"z": "fd47437e.e21aa",
"name": "",
"label": "LED",
"group": "be67e649.357968",
"format": "rgb",
"outformat": "object",
"showSwatch": true,
"showPicker": true,
"showValue": true,
"showHue": false,
"showAlpha": false,
"showLightness": true,
"dynOutput": "false",
"order": 0,
"width": 0,
"height": 0,
"passthru": true,
"topic": "",
"x": 270,
"y": 620,
"wires": [
[
"5a82fd29.44ccac"
]
]
},
{
"id": "99dde901.715ce",
"type": "ui_gauge",
"z": "fd47437e.e21aa",
"name": "Temperature Gauge",
"group": "7e7ef767.3e339",
"order": 1,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "Temperature",
"label": "°C",
"format": "{{value | number:1}}",
"min": "-30",
"max": "100",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 780,
"y": 220,
"wires": []
},
{
"id": "a0adf36d.51b37",
"type": "ui_gauge",
"z": "fd47437e.e21aa",
"name": "Humidity Gauge",
"group": "26985721.743b18",
"order": 1,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "Humidity",
"label": "%",
"format": "{{value | number:1}}",
"min": 0,
"max": "100",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 760,
"y": 420,
"wires": []
},
{
"id": "9922e191.af4fc8",
"type": "ui_gauge",
"z": "fd47437e.e21aa",
"name": "Orientation",
"group": "d4761c71.80721",
"order": 4,
"width": 0,
"height": 0,
"gtype": "compass",
"title": "Orientation",
"label": "°",
"format": "{{value | number:1}}",
"min": "0",
"max": "360",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 750,
"y": 520,
"wires": []
},
{
"id": "ba444fa5.e56808",
"type": "ui_chart",
"z": "fd47437e.e21aa",
"name": "Pressure Chart",
"group": "a3b17833.ce9cf8",
"order": 3,
"width": 0,
"height": 0,
"label": "Pressure",
"chartType": "line",
"legend": "false",
"xformat": "HH:mm:ss",
"interpolate": "linear",
"nodata": "no data",
"dot": false,
"ymin": "",
"ymax": "",
"removeOlder": 1,
"removeOlderPoints": "",
"removeOlderUnit": "3600",
"cutout": 0,
"useOneColor": false,
"colors": [
"#1f77b4",
"#aec7e8",
"#ff7f0e",
"#2ca02c",
"#98df8a",
"#d62728",
"#ff9896",
"#9467bd",
"#c5b0d5"
],
"useOldStyle": false,
"x": 760,
"y": 360,
"wires": [
[],
[]
]
},
{
"id": "684f463e.a67e08",
"type": "rbe",
"z": "fd47437e.e21aa",
"name": "",
"func": "deadbandEq",
"gap": "0.1",
"start": "",
"inout": "out",
"property": "payload",
"x": 570,
"y": 220,
"wires": [
[
"99dde901.715ce",
"dea80a9.06a4af8"
]
]
},
{
"id": "5f81af96.9837a",
"type": "rbe",
"z": "fd47437e.e21aa",
"name": "",
"func": "deadbandEq",
"gap": "0.1",
"start": "",
"inout": "out",
"property": "payload",
"x": 570,
"y": 420,
"wires": [
[
"a0adf36d.51b37",
"af44a971.a42448"
]
]
},
{
"id": "2526530a.198c7c",
"type": "rbe",
"z": "fd47437e.e21aa",
"name": "",
"func": "deadbandEq",
"gap": "0.1",
"start": "",
"inout": "out",
"property": "payload",
"x": 570,
"y": 320,
"wires": [
[
"ba444fa5.e56808",
"ea0515e0.796008"
]
]
},
{
"id": "ddd2a50b.358408",
"type": "rbe",
"z": "fd47437e.e21aa",
"name": "",
"func": "deadbandEq",
"gap": "0.1",
"start": "",
"inout": "out",
"property": "payload",
"x": 570,
"y": 520,
"wires": [
[
"9922e191.af4fc8"
]
]
},
{
"id": "9a71ea81.cac458",
"type": "ui_button",
"z": "fd47437e.e21aa",
"name": "",
"group": "be67e649.357968",
"order": 0,
"width": 0,
"height": 0,
"passthru": false,
"label": "Red",
"color": "",
"bgcolor": "Red",
"icon": "",
"payload": "{"r":255,"g":0,"b":0,"a":1}",
"payloadType": "json",
"topic": "",
"x": 90,
"y": 580,
"wires": [
[
"b461cb2e.d156"
]
]
},
{
"id": "6d6a4864.12d508",
"type": "ui_button",
"z": "fd47437e.e21aa",
"name": "",
"group": "be67e649.357968",
"order": 0,
"width": 0,
"height": 0,
"passthru": false,
"label": "Green",
"color": "",
"bgcolor": "Green",
"icon": "",
"payload": "{"r":0,"g":255,"b":0,"a":1}",
"payloadType": "json",
"topic": "",
"x": 90,
"y": 620,
"wires": [
[
"b461cb2e.d156"
]
]
},
{
"id": "e63c60a8.faae7",
"type": "ui_button",
"z": "fd47437e.e21aa",
"name": "",
"group": "be67e649.357968",
"order": 0,
"width": 0,
"height": 0,
"passthru": false,
"label": "Blue",
"color": "",
"bgcolor": "Blue",
"icon": "",
"payload": "{"r":0,"g":0,"b":255,"a":1}",
"payloadType": "json",
"topic": "",
"x": 90,
"y": 660,
"wires": [
[
"b461cb2e.d156"
]
]
},
{
"id": "dea80a9.06a4af8",
"type": "ui_chart",
"z": "fd47437e.e21aa",
"name": "Temperature Chart",
"group": "7e7ef767.3e339",
"order": 2,
"width": 0,
"height": 0,
"label": "Temperature",
"chartType": "line",
"legend": "false",
"xformat": "HH:mm:ss",
"interpolate": "linear",
"nodata": "no data",
"dot": false,
"ymin": "",
"ymax": "",
"removeOlder": 1,
"removeOlderPoints": "",
"removeOlderUnit": "3600",
"cutout": 0,
"useOneColor": false,
"colors": [
"#1f77b4",
"#aec7e8",
"#ff7f0e",
"#2ca02c",
"#98df8a",
"#d62728",
"#ff9896",
"#9467bd",
"#c5b0d5"
],
"useOldStyle": false,
"x": 770,
"y": 260,
"wires": [
[],
[]
]
},
{
"id": "ea0515e0.796008",
"type": "ui_gauge",
"z": "fd47437e.e21aa",
"name": "Pressure Gauge",
"group": "a3b17833.ce9cf8",
"order": 1,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "Pressure",
"label": "mbar",
"format": "{{value | number:1}}",
"min": "260",
"max": "1260",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 770,
"y": 320,
"wires": []
},
{
"id": "af44a971.a42448",
"type": "ui_chart",
"z": "fd47437e.e21aa",
"name": "Humidity Chart",
"group": "26985721.743b18",
"order": 3,
"width": 0,
"height": 0,
"label": "Humidity",
"chartType": "line",
"legend": "false",
"xformat": "HH:mm:ss",
"interpolate": "linear",
"nodata": "no data",
"dot": false,
"ymin": "",
"ymax": "",
"removeOlder": 1,
"removeOlderPoints": "",
"removeOlderUnit": "3600",
"cutout": 0,
"useOneColor": false,
"colors": [
"#1f77b4",
"#aec7e8",
"#ff7f0e",
"#2ca02c",
"#98df8a",
"#d62728",
"#ff9896",
"#9467bd",
"#c5b0d5"
],
"useOldStyle": false,
"x": 760,
"y": 460,
"wires": [
[],
[]
]
},
{
"id": "fa47ae1e.212af",
"type": "ui_button",
"z": "fd47437e.e21aa",
"name": "",
"group": "be67e649.357968",
"order": 0,
"width": 0,
"height": 0,
"passthru": false,
"label": "Black",
"color": "",
"bgcolor": "Black",
"icon": "",
"payload": "{"r":0,"g":0,"b":0,"a":1}",
"payloadType": "json",
"topic": "",
"x": 90,
"y": 700,
"wires": [
[
"b461cb2e.d156"
]
]
},
{
"id": "5768184e.c56d7",
"type": "ui_button",
"z": "fd47437e.e21aa",
"name": "",
"group": "be67e649.357968",
"order": 0,
"width": 0,
"height": 0,
"passthru": false,
"label": "White",
"color": "Black",
"bgcolor": "White",
"icon": "",
"payload": "{"r":255,"g":255,"b":255,"a":1}",
"payloadType": "json",
"topic": "",
"x": 90,
"y": 740,
"wires": [
[
"b461cb2e.d156"
]
]
},
{
"id": "b96d491a.dcdc78",
"type": "modbus-client",
"z": "",
"name": "Sense-OMB",
"clienttype": "tcp",
"bufferCommands": true,
"stateLogEnabled": false,
"tcpHost": "127.0.0.1",
"tcpPort": "1502",
"tcpType": "DEFAULT",
"serialPort": "/dev/ttyUSB",
"serialType": "RTU-BUFFERD",
"serialBaudrate": "9600",
"serialDatabits": "8",
"serialStopbits": "1",
"serialParity": "none",
"serialConnectionDelay": "100",
"unit_id": 1,
"commandDelay": 1,
"clientTimeout": 1000,
"reconnectTimeout": 2000
},
{
"id": "be67e649.357968",
"type": "ui_group",
"z": "",
"name": "Output",
"tab": "8664d22c.b212",
"order": 5,
"disp": true,
"width": "6",
"collapse": false
},
{
"id": "7e7ef767.3e339",
"type": "ui_group",
"z": "",
"name": "Temperature",
"tab": "8664d22c.b212",
"order": 1,
"disp": true,
"width": "6",
"collapse": false
},
{
"id": "26985721.743b18",
"type": "ui_group",
"z": "",
"name": "Humidity",
"tab": "8664d22c.b212",
"order": 3,
"disp": true,
"width": "6",
"collapse": false
},
{
"id": "d4761c71.80721",
"type": "ui_group",
"z": "",
"name": "Inertial Measurement Unit",
"tab": "8664d22c.b212",
"order": 4,
"disp": true,
"width": "6",
"collapse": false
},
{
"id": "a3b17833.ce9cf8",
"type": "ui_group",
"z": "",
"name": "Pressure",
"tab": "8664d22c.b212",
"order": 2,
"disp": true,
"width": "6",
"collapse": false
},
{
"id": "8664d22c.b212",
"type": "ui_tab",
"z": "",
"name": "SenseHAT",
"icon": "dashboard",
"order": 1
}
]
Ce « flow » procède donc à une lecture des mesures disponibles dans le SenseHAT, avec un nœud qui effectue une requête FC3, (lecture de registres), et une fonction (DataSplitter) qui découpe la réponse en ses composantes.
Une fonction prend un message en entrée et peut retourner un ou plusieurs messages en sortie.
Ci-gît le code du DataSplitter :
var Pressure = { payload:msg.payload.buffer.readFloatBE(4) };
var Humidity = { payload:msg.payload.buffer.readFloatBE(8) };
var Orientation = { payload:msg.payload.buffer.readFloatBE(12) };
return [ Temperature, Pressure, Humidity, Orientation ];
Une mesure physique évolue sans cesse, les blocs « deadband » permettent de limiter le rafraichissement de l’interface utilisateur qui pourrait saturer si l’on augmentait la fréquence de la lecture.
Comme l’UI n’affiche qu’un chiffre après la virgule, le « deadband » est configuré pour ne laisser passer la valeur que si l’écart avec la valeur précédente est supérieur ou égal à 0.1.
Enfin, la mesure est affichée grâce aux composants graphiques du tableau de bord, jauges et courbes de tendance.
Pour ce qui est des LEDs, il est possible de choisir une couleur dans la palette ou une présélection avec les boutons.
Les composantes Rouge, Vert et Bleu sont mises en forme par la fonction RGB :
msg_out.payload[0] = msg.payload.r;
msg_out.payload[1] = msg.payload.g;
msg_out.payload[2] = msg.payload.b;
return msg_out;
Elles sont pour finir transmises au SenseHAT avec la fonction FC16 (écriture de registres).
Et ça nous donne un superbe tableau de bord :

Mon WordPress ne permet pas que je vous donne les fichiers .py, sécurité oblige.
Veuillez trouver ci-dessous les liens vers les fichiers Python et Node-RED :
Node-RED exporte tout sur une seule ligne en version compact :
Node-RED 20181121
Le même fichier passé à la moulinette ou exporté en version formatée :
Node-RED 20181121-1
Le lien que j’avais fourni n’est plus d’actualité :
kbhit.py
Le serveur Modbus TCP / Sense HAT :
sense-omb.py
Cordialement,
Stéphane