Bonjour,
Je disais donc dans mon dernier article qu’il fallait que je vous fasse une petite démonstration de l’utilisation du netHAT Hilscher avec un Raspberry Pi 3 et « Ada for Automation ».
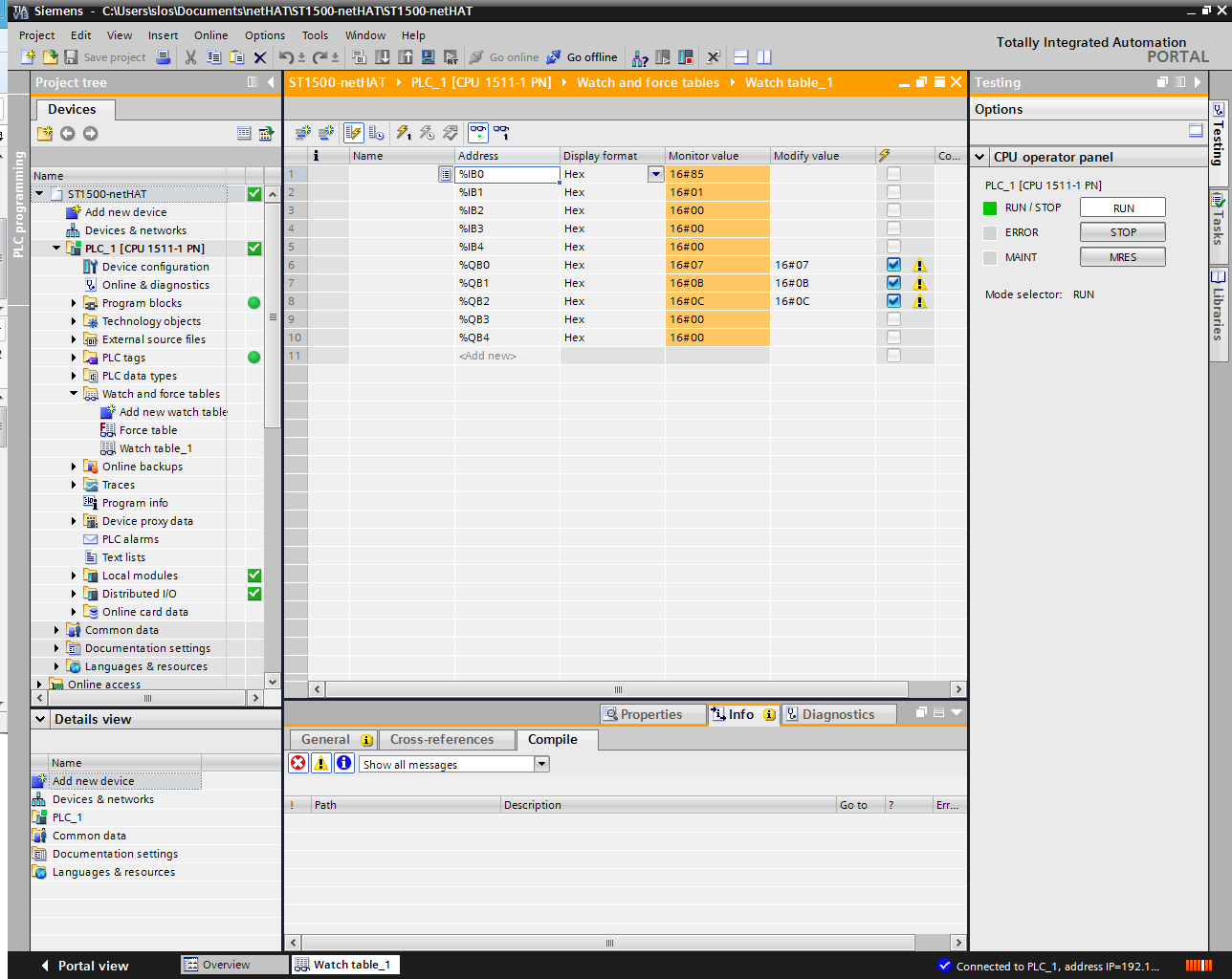
Voilà donc une copie d’écran montrant l’application piano connectée, via le netHAT configuré en PROFINET IO Device, à un automate SIEMENS S7 1500-PN PROFINET IO Contrôleur :

On reconnait dans cette vue de TIA Portal les valeurs d’E/S affichées dans la vue ci-dessus, les bits de poids faible sont à gauche dans la vue du piano (b0 .. b7) :
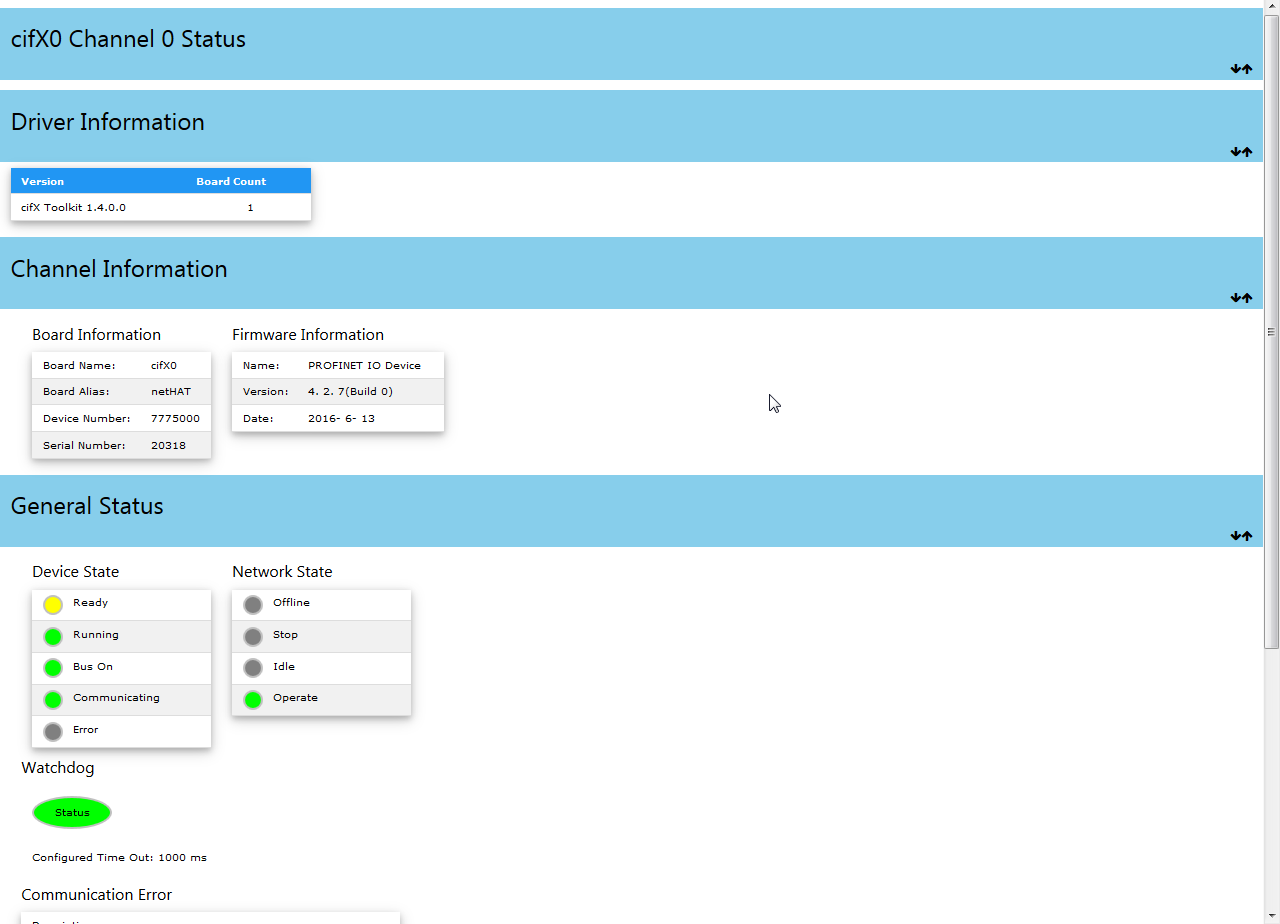
La vue d’état cifX montre donc l’état du netHAT puisque celui-ci partage avec celle-ci, comme la plupart des produits Hilscher, l’API cifX, la Dual Port Memory, les piles de protocoles et l’OS.
La seule subtilité que j’ai rencontrée, c’est que la version du pilote Linux livrée avec le netHAT est plus récente que celle que j’utilisais jusqu’alors (la V1.1.0.0) et que l’architecture en a été revue.
En substance, un plugin permet maintenant de gérer la connexion via SPI et il n’est plus nécessaire de le gérer côté application. Le netHAT est directement vu comme une cifX.
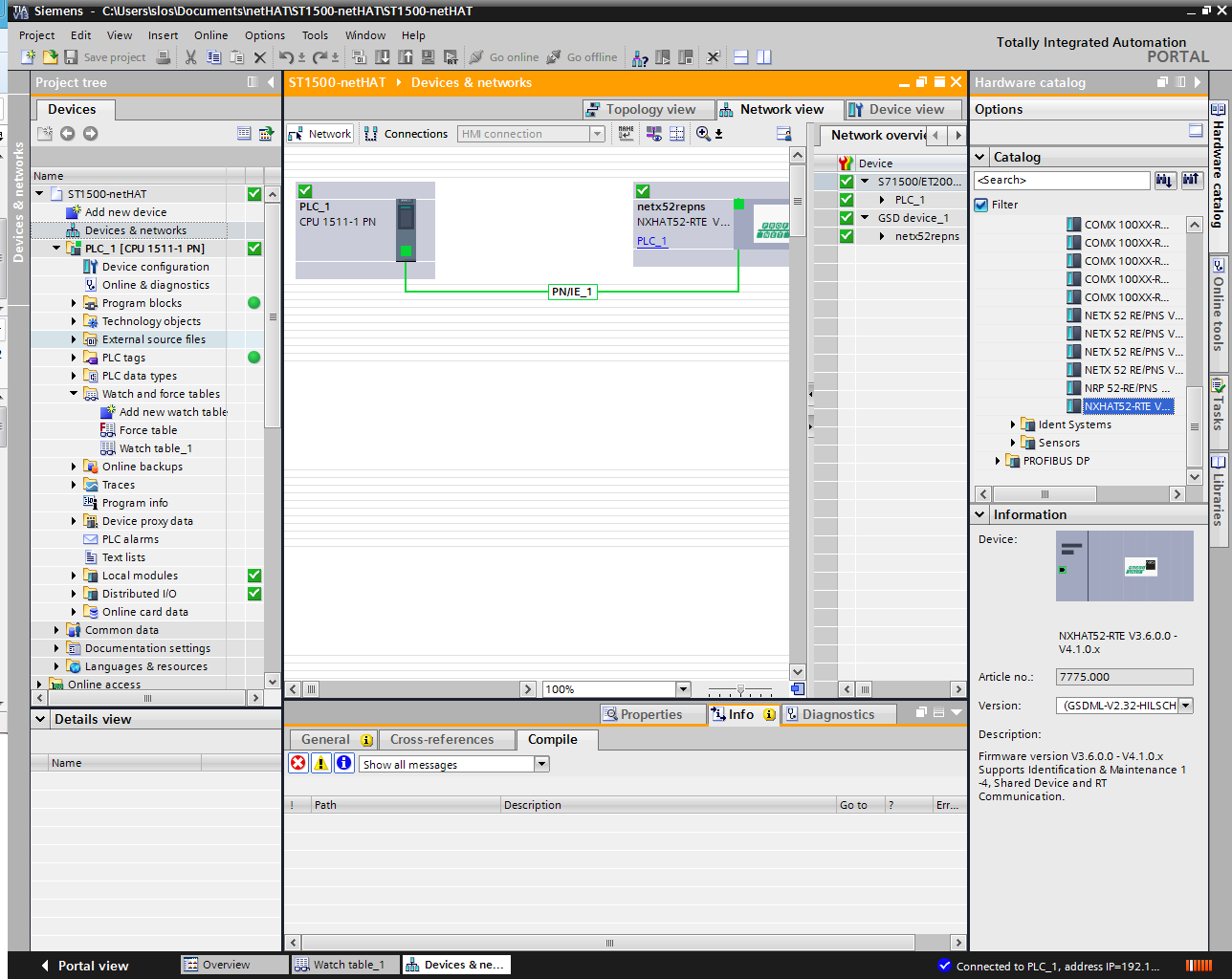
Bien sûr, tout baigne côté automate aussi !
Une petite formation ? 😉
Cordialement,
Stéphane