Bonjour,
Je cherchais pour mes expériences une solution qui soit ludique, et aussi accessible à tout un chacun, et mes tribulations m’ont conduit à sélectionner un combo Raspberry Pi 3 + SenseHAT.
Hilscher France a donc fait l’acquisition de ces éléments chez KUBII :
Starter Kit Officiel Pi3
https://www.kubii.fr/fr/kits-raspberry-pi/1637-kit-demarrage-raspberry-pi3-3272496004207.html
Raspberry Pi Sense Hat
https://www.kubii.fr/fr/cartes-extension-cameras-raspberry-pi/1081-raspberry-pi-sense-hat-640522710799.html
Pourquoi donc un tel investissement me direz vous ?
Sans doute parce que depuis quelques temps cette plateforme économique et performante permet d’imaginer tout un tas d’utilisations dans ce qu’il est convenu d’appeler l’IoT, l’IIoT, Industry 4.0, etc…
Aussi, à l’instar de certains confrères, la société Hilscher a développé certains produits autour de cette plateforme comme le netHAT, le netPi et le Edge Gateway « Connect » :
https://www.netiot.com/interface/nethat/
https://www.netiot.com/netpi/industrial-raspberry-pi-3/
https://www.netiot.com/edge/
Hilscher innove en testant le canal de vente Amazon et l’on peut y acheter le netHAT et le netPi :
https://www.amazon.fr/Hilscher-NXHAT52-RTE-nethat-52-de-RTE/dp/B01MFH0FP9
https://www.amazon.fr/Industrial-Raspberry-Industry-Communication-4×1-2Ghz-Real-Time-Ethernet/dp/B0756XD2CN
Pour ces produits, Hilscher France n’assure pas de support.
Cependant, l’on peut vous proposer une formation !
Le netHAT est fourni avec un pilote Linux compilé, des firmwares en version limitée à 32 octets d’E/S pour EtherCAT, Ethernet/IP et PROFINET IO Device et bien sûr de la documentation.
Le tout s’installe sans encombre sur la Raspbian et ça tombe en marche comme sur le plan.
Vous pouvez donc vous familiariser avec la technologie Hilscher pour une quarantaine d’euros, ce qui est modique vous en conviendrez aisément.
Bien sûr, « Ada for Automation » peut tout à fait être utilisé avec le netHAT. J’y reviendrai bien sûr.
Avec un Raspberry Pi + un netHAT, on peut aussi tester le concept netPi et développer des applications qui tourneront sur le netPi sans modification.
Bref, je souhaitais monter une manipulation avec un Rasberry Pi 3, un SenseHAT pour des capteurs pas chers et un netHAT pour connecter ce bijou de technologie à votre automate préféré.
En fait, le SenseHAT et le netHAT ne peuvent pas se monter l’un sur l’autre comme on pourrait le penser de prime abord.
Je pensais développer un binding Ada pour le SenseHAT mais ce n’est pas si simple.
Le langage choisi par l’équipe Raspberry est plutôt le Python et la plupart des bibliothèques fournies pour les « HAT » sont en Python.
La bibliothèque disponible pour le SenseHAT est donc en Python aussi et utilise d’une part une bibliothèque en C++ qui gère nombre de capteurs et d’autre part le framebuffer pour les LEDs et un IO device pour le joystick.
Monsieur Phil Munts, que je remercie, m’a bien fait part de sa librairie :
http://git.munts.com/libsimpleio/ada/
Mais je voulais quelque chose de super vite fait et j’ai penché pour une solution mettant en œuvre un framework Modbus développé par un collègue, Monsieur Luc JEAN, que je remercie chaleureusement :
https://github.com/ljean/modbus-tk
Pourquoi donc ? « Ada for Automation » disposant de la fonctionnalité Modbus TCP Client et le framework permettant de réaliser très simplement un serveur Modbus TCP, il suffisait donc de raccrocher les données des capteurs dans les registres du serveur.
J’ai utilisé également ce bout de code qui m’a bien aidé, je remercie aussi son auteur :
https://frank-deng.github.io/python-kbhit.en.html
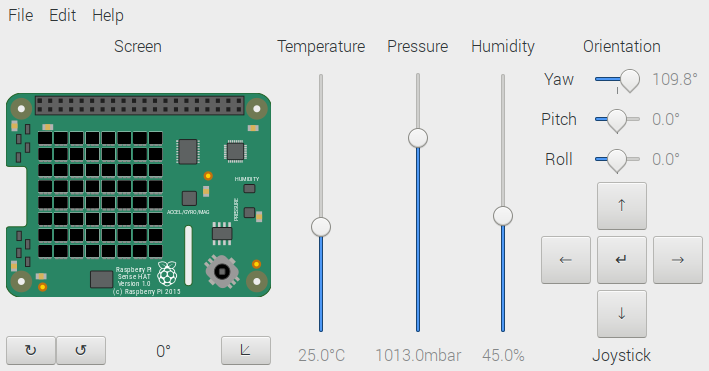
Le SenseHAT dispose d’une application de simulation avec interface graphique et il est possible d’utiliser celle-ci en lieu et place du matériel tel que dans l’exemple suivant.
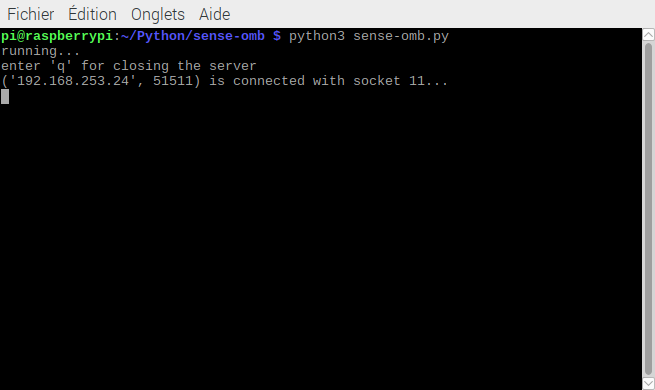
On y démarre depuis un terminal :
Et on teste par exemple avec Modbus Poll :
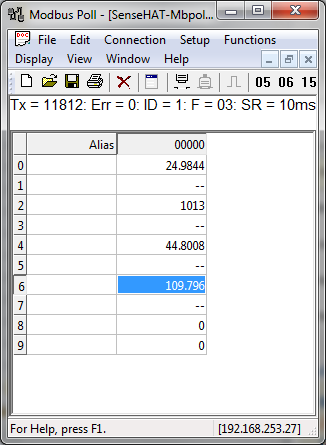
En Python, c’est une vingtaine de lignes de code pour remonter température, pression, hygrométrie et cap :
# -*- coding: utf_8 -*-
"""
Modbus TestKit: Implementation of Modbus protocol in python
(C)2009 - Luc Jean - luc.jean@gmail.com
(C)2009 - Apidev - http://www.apidev.fr
This is distributed under GNU LGPL license, see license.txt
"""
import sys
import struct
import modbus_tk
import modbus_tk.defines as cst
from modbus_tk import modbus_tcp
from sense_emu import SenseHat
import kbhit, time;
sense = SenseHat()
def main():
"""main"""
kbhit.init();
running = True;
logger = modbus_tk.utils.create_logger(name="console", record_format="%(message)s")
try:
#Create the server
server = modbus_tcp.TcpServer(port=1502)
logger.info("running...")
logger.info("enter 'q' for closing the server")
server.start()
slave_1 = server.add_slave(1)
slave_1.add_block('0', cst.HOLDING_REGISTERS, 0, 100)
while running:
if kbhit.kbhit():
ch = kbhit.getch();
if 'q' == ch:
running = False;
slave_1.set_values('0', 0, struct.unpack('>HH', struct.pack('>f', sense.temp)))
slave_1.set_values('0', 2, struct.unpack('>HH', struct.pack('>f', sense.pressure)))
slave_1.set_values('0', 4, struct.unpack('>HH', struct.pack('>f', sense.humidity)))
slave_1.set_values('0', 6, struct.unpack('>HH', struct.pack('>f', sense.compass)))
time.sleep(0.1);
finally:
server.stop()
kbhit.restore();
if __name__ == "__main__":
main()
C’est naturellement pas très temps réel mais c’est très bien pour mon cas d’école.
Et en plus, on peut facilement imaginer de reproduire ce schéma avec d’autres HATs comme le « Automation HAT » par exemple :
https://shop.pimoroni.com/products/automation-hat
Vous pouvez donc remonter les données du SenseHAT vers votre automate préféré disposant d’une connectivité Modbus TCP Client.
Bon, en travaillant un peu, ça doit fonctionner dans les deux sens, hein !
Quid du netHAT ? Si on utilise l’application de simulation SenseHAT on peut bien sûr le mettre sur le même Raspberry Pi et se connecter en local.
Si l’on souhaite de vraies données physiques, il faudra l’installer sur un autre Raspberry Pi, et le faire communiquer avec le premier, toujours en Modbus TCP.
C’est trivial avec « Ada for Automation » et je vous le montrerai ce tantôt.
Cordialement,
Stéphane