Bonjour,
Nous avons pu voir dans les articles précédents quelques tableaux de bord réalisés avec des composants issus de la bibliothèque suivante :
https://github.com/node-red/node-red-dashboard
Ce n’est certes pas la seule solution et le couple InfluxDB / Grafana est souvent cité pour réaliser des projets IoT avec le Raspberry Pi.
InfluxDB permet de stocker des données horodatées dans une base de données que Grafana va interroger pour les afficher sous forme de diagrammes, de graphiques, ou sous forme tabulaire.
Ce sont des projets « open source » et il est possible de les installer sur toutes sortes de machines dont le Raspberry Pi.
Il se trouve qu’il y a un nœud Node-RED qui permet d’insérer depuis un flow des données dans une base InfluxDB, ce qui rend l’opération triviale :
https://flows.nodered.org/node/node-red-contrib-influxdb
Voilà, voilà…
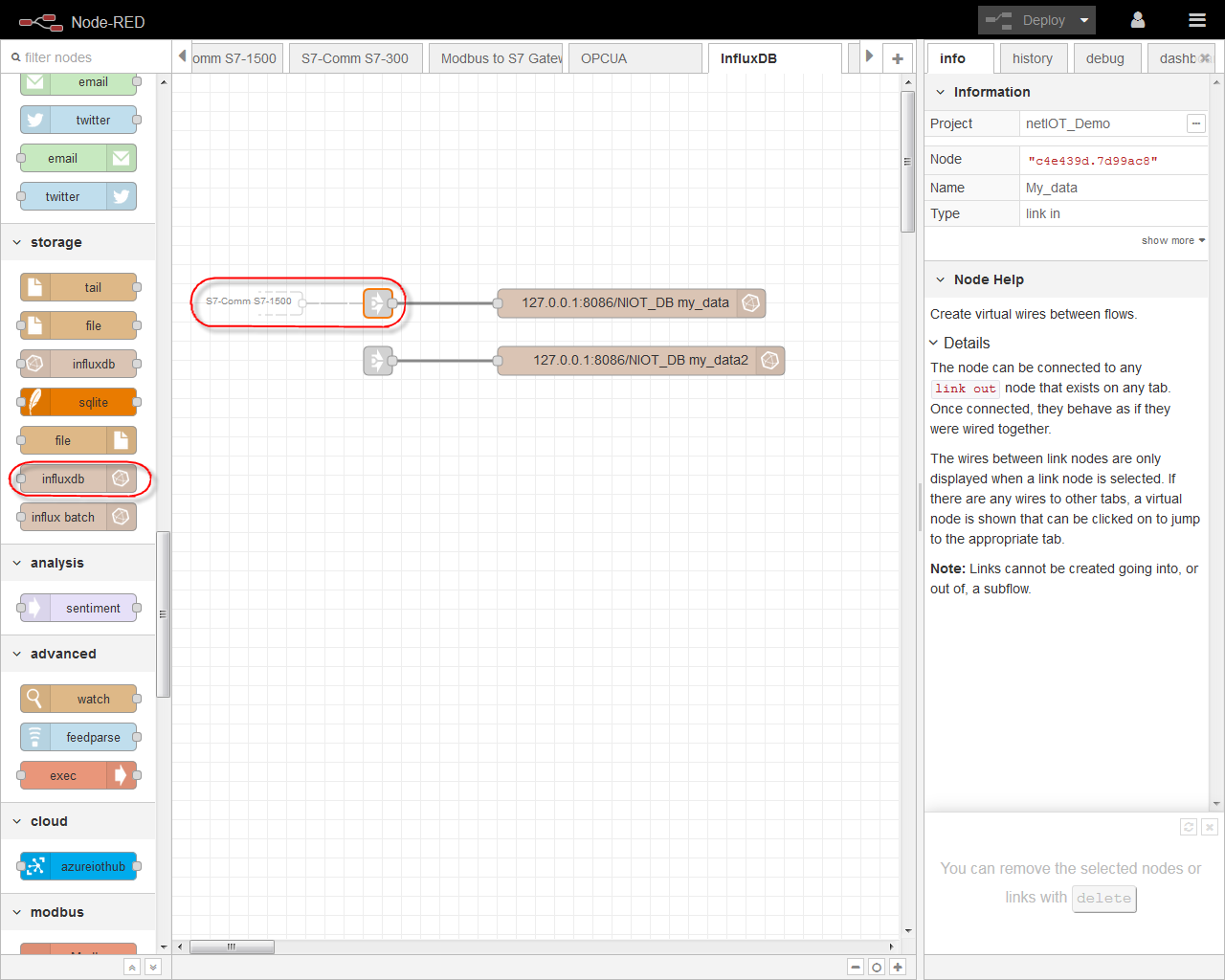
Les données du « flow » présenté ici parviennent via le lien (link) au nœud qui les envoie à la base de données InfluxDB.
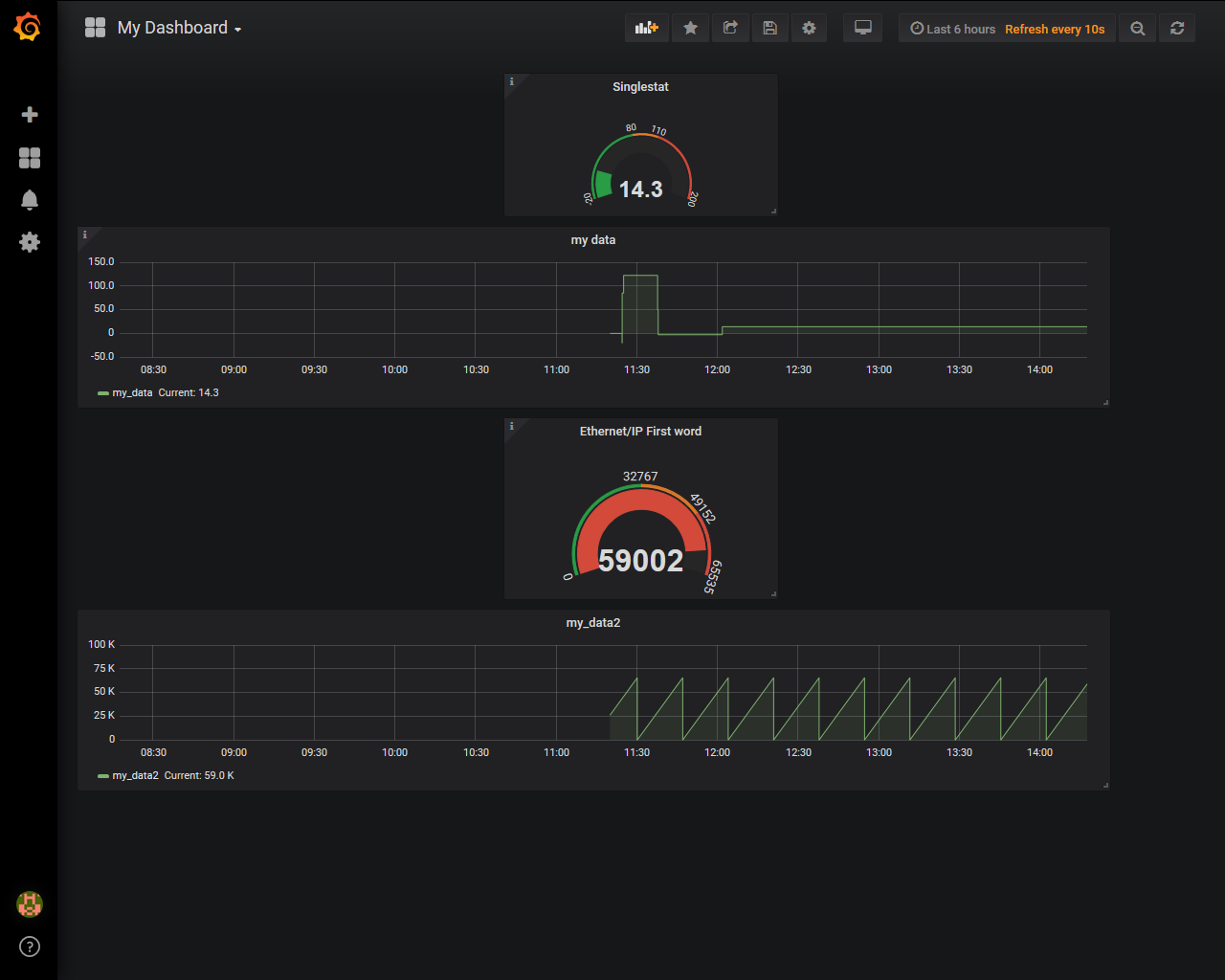
Et Grafana peut piocher dans les données pour les afficher comme vous le souhaitez :
En ce qui concerne la mise en œuvre d’une telle solution sur votre Raspberry Pi les articles et la documentation ne manquent pas.
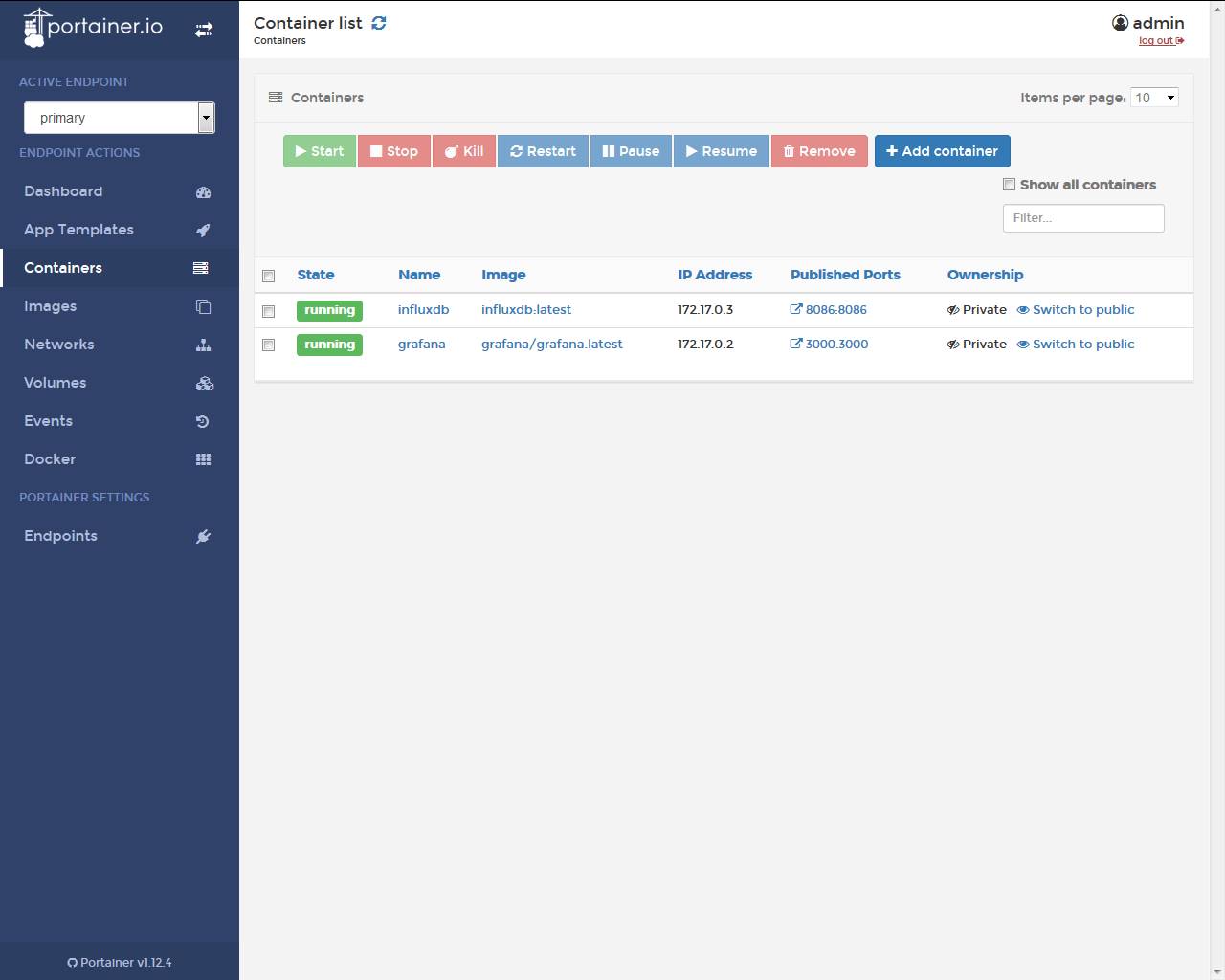
Sur les solutions durcies netIOT Edge de Hilscher le système d’exploitation sécurisé ne permet pas d’installer quoi que ce soit non signé par Hilscher et il faut utiliser Docker via l’interface d’administration Portainer, ce qui est chose relativement aisée.
En fait, des conteneurs officiels sont disponibles sur le Hub Docker tant pour InfluxDB que pour Grafana.
Et Portainer permet de télécharger les images et de configurer les conteneurs correspondants.
Bien sûr, InfluxDB comme Grafana ont beaucoup plus à offrir, ce que je vous laisse le soin d’approfondir.
Comme l’interface applicative est basée sur le protocole HTTP, toutes sortes d’architectures sont envisageables.
Cordialement,
Stéphane