Bonjour,
Comme je l’indiquais récemment l’application « app6_gui » offre :
- un serveur Modbus TCP pour y connecter par exemple un SCADA du marché,
- une fonction IO Scanning avec une tâche client Modbus TCP par serveur d’E/S,
- deux canaux cifX Hilscher, pour gérer deux cartes, par exemple une PROFIBUS DP Maitre et une EtherCAT Maitre, ou pour gérer une carte à deux canaux comme par exemple un PROFIBUS DP Maitre et un CANopen Maitre,
- une interface graphique avec GtkAda, permettant de consulter l’état des communications et de l’application et de démarrer ou arrêter les programmes utilisateur,
- l’intégration du « cifX TCP Server » permettant la configuration et le diagnostic des cartes par SYCON.net via une connexion TCP/IP.
Je voulais faire un article à part pour cette application, avec des images. J’ai donc monté la manipulation suivante :
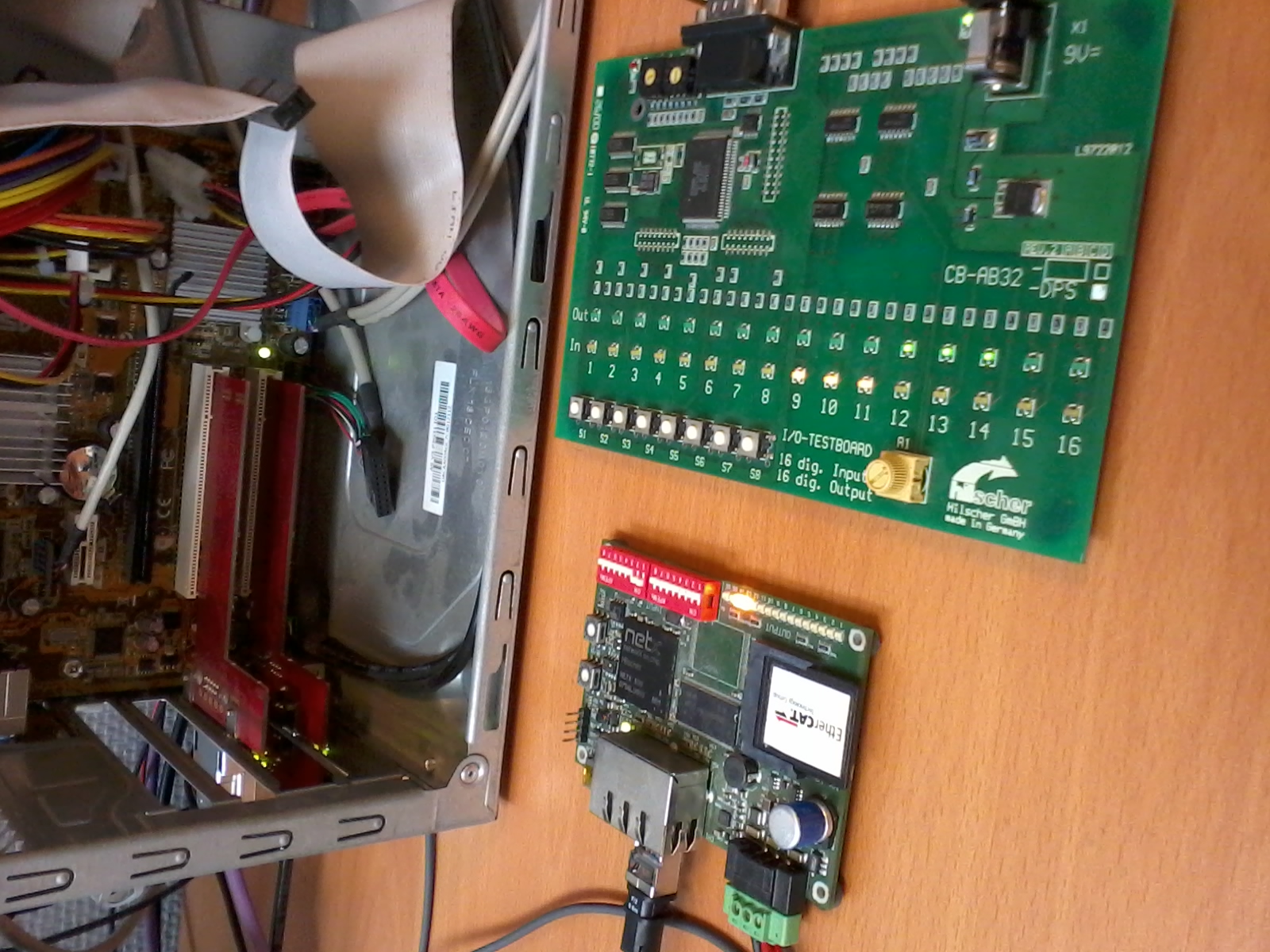
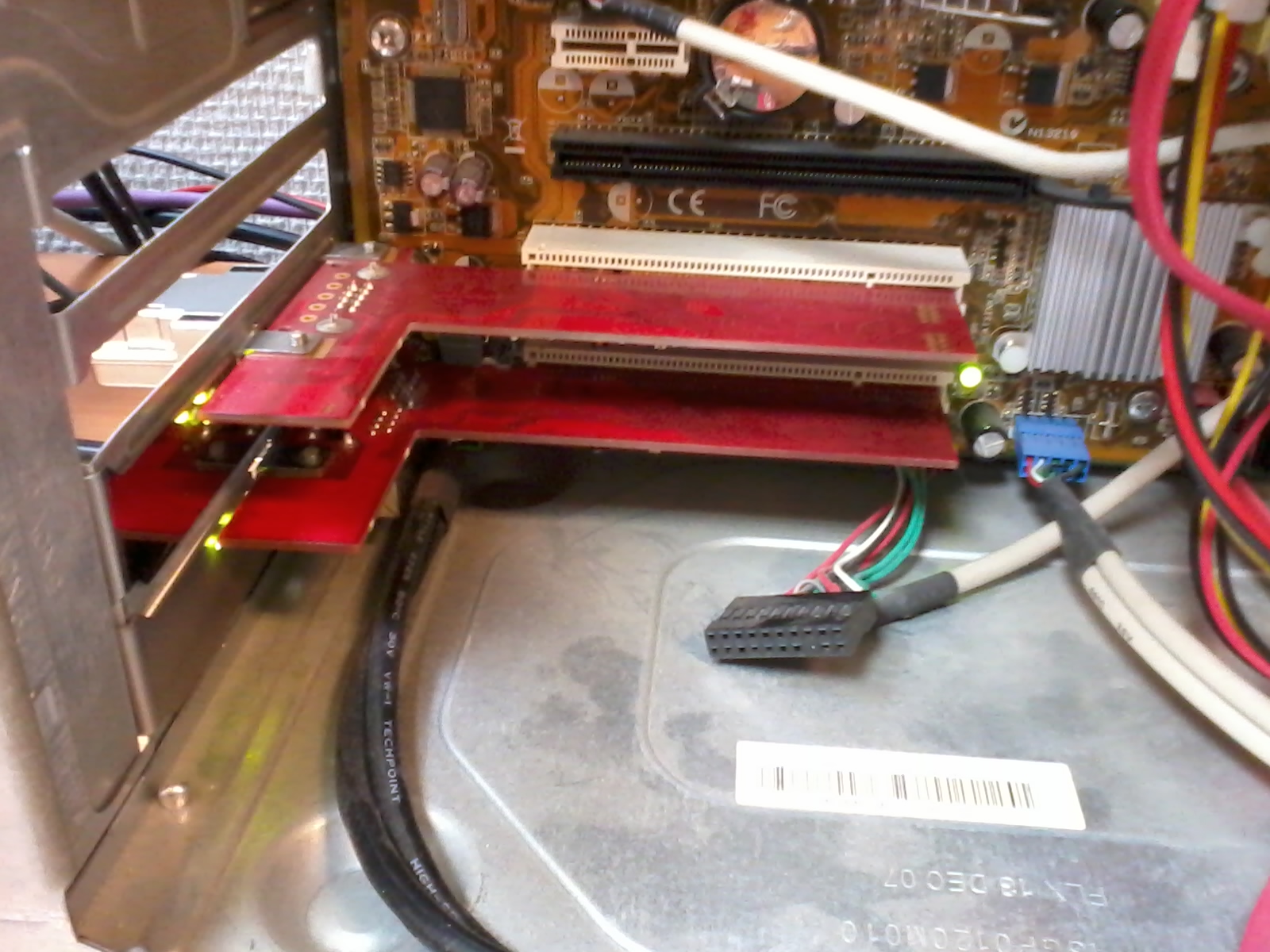
On a donc un PC, sous Debian Jessie et un noyau Linux 64 bit standard, avec deux cartes Hilscher PCI, une cifX 50-DP configurée en Maître PROFIBUS DP et une cifX 50-RE configurée en Maître EtherCAT :
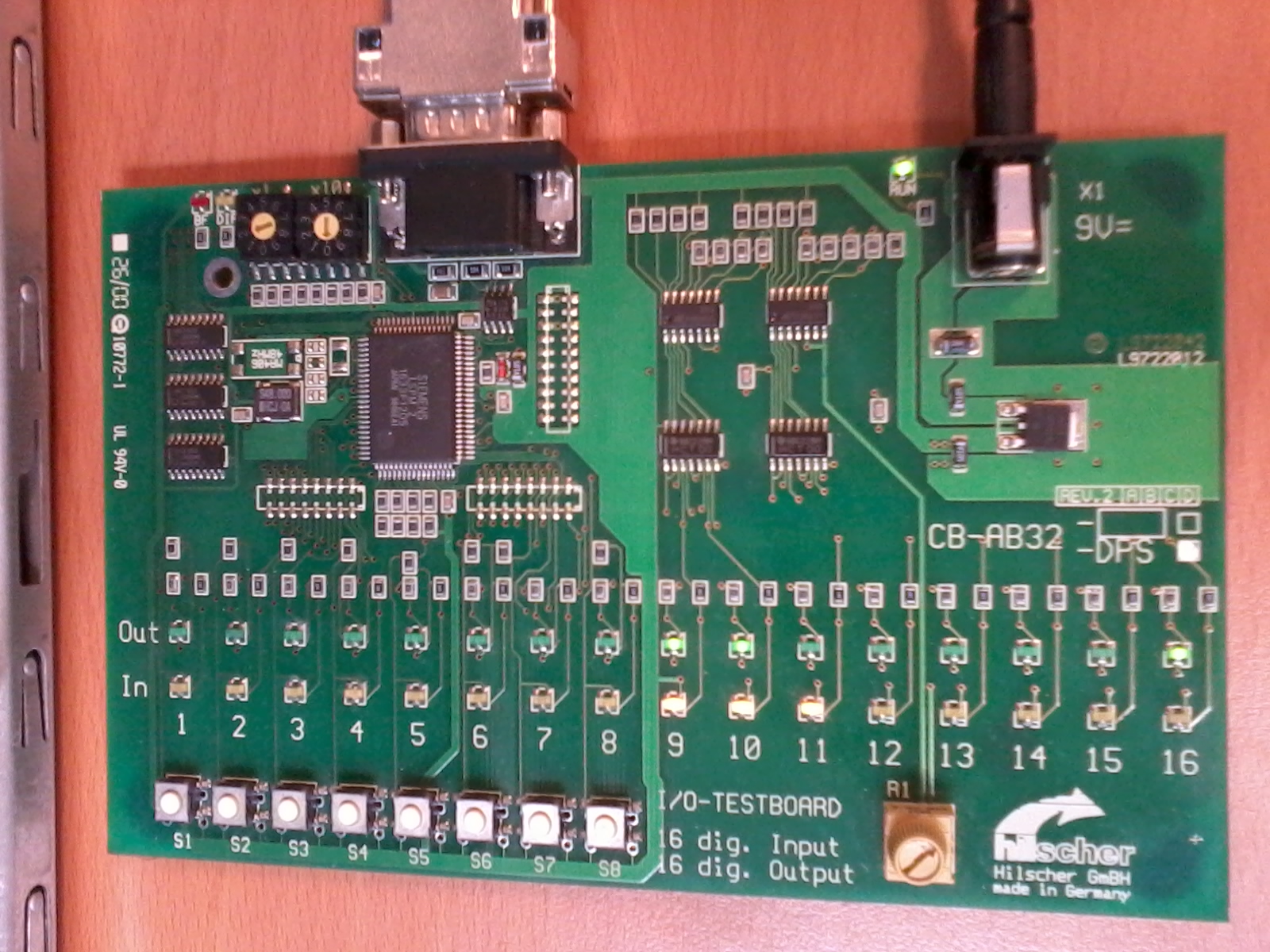
Comme Esclave PROFIBUS DP j’ai une carte Hilscher CB-AB32-DPS, un « piano » avec deux octets en entrée et autant en sortie qui permet de monter une manipulation en deux secondes et demie :
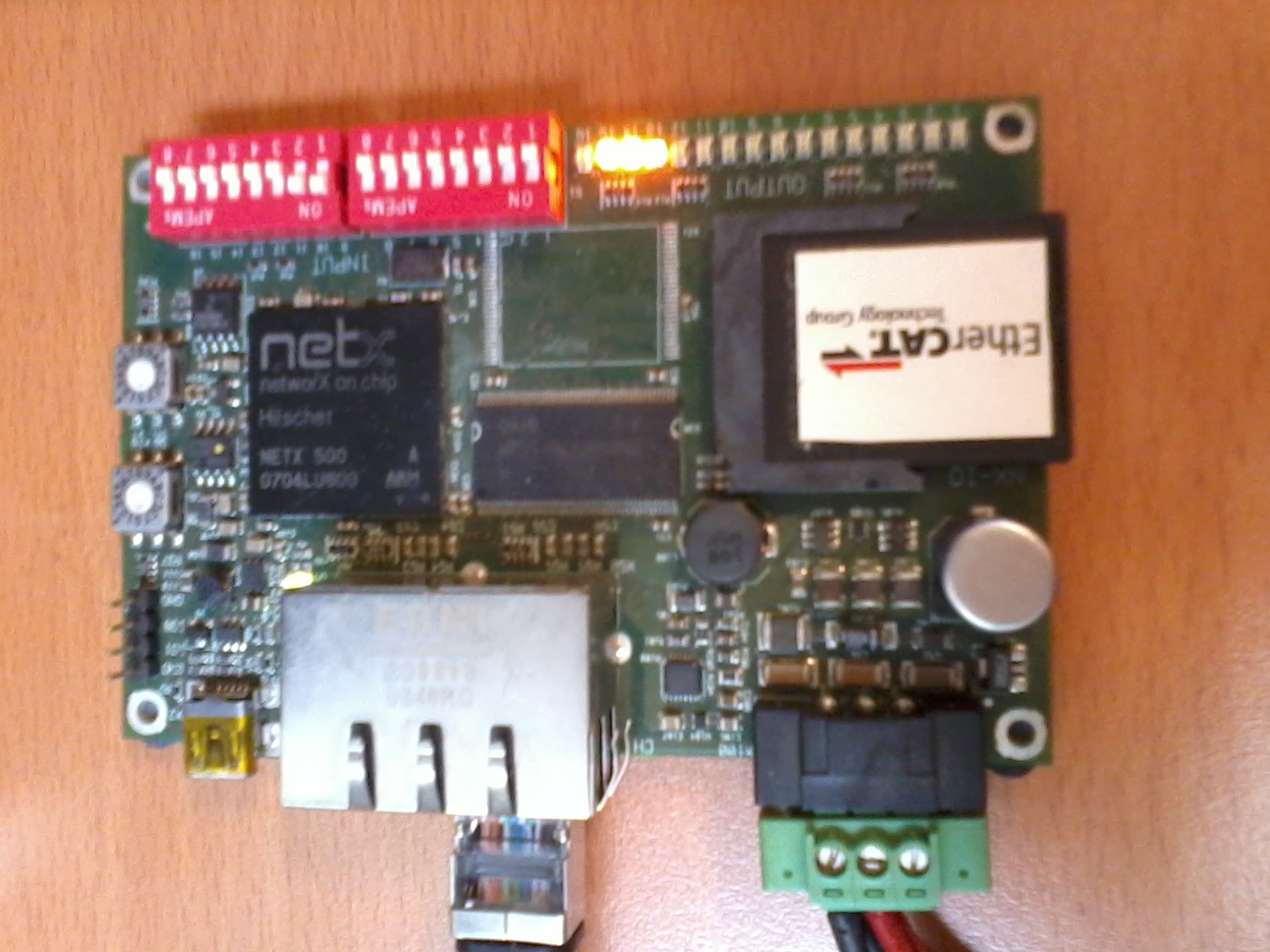
Pour EtherCAT, j’ai également un « piano », le NXIO 500-RE, qui reçoit sa fonctionnalité en insérant la carte MMC qui convient, ici EtherCAT Esclave, avec toujours deux octets d’E/S :
Le client Modbus TCP qui interroge le serveur de l’application 6 est Modbus Poll dont j’ai déjà fait mention il y a longtemps.
Quant au client Modbus TCP, ce que certains appellent IO Scanning, il est configuré pour exécuter deux requêtes sur un serveur d’un genre particulier sur lequel je reviendrai plus tard.
Je vous épargne la trace laissée par l’application dans le terminal depuis lequel elle est lancée, qui est certes informative, voire même didactique, mais un peu indigeste.
La fenêtre principale s’ouvre et l’on y trouve les onglets suivants.
La vue « Identité », (remarquez la version !) :
La vue « Etat général » en deux bouts :
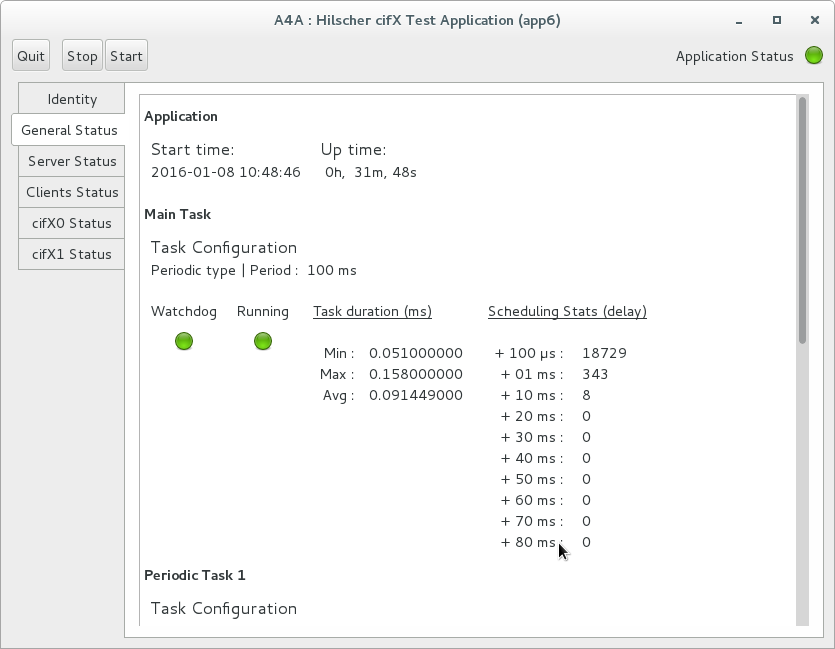
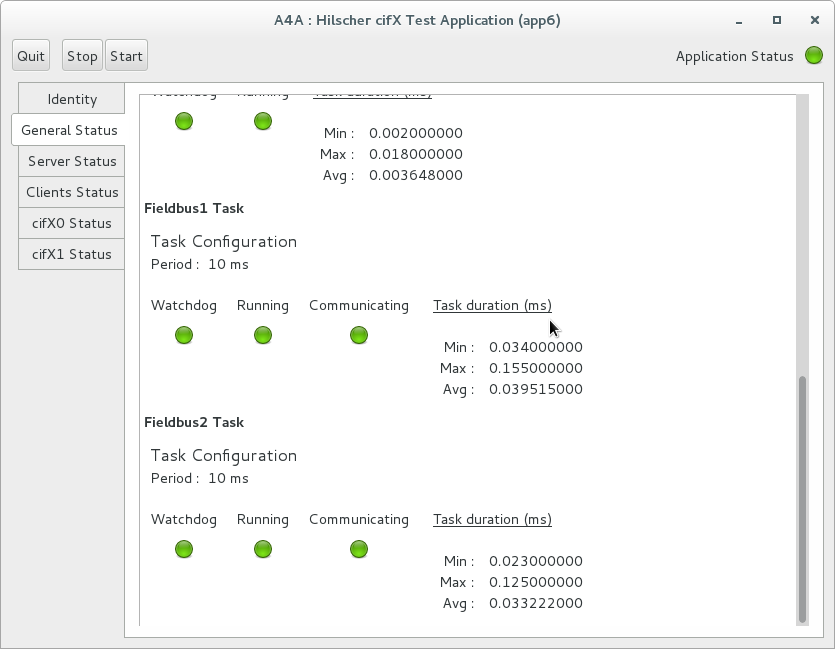
On notera la présence des informations d’état des deux tâches « Fieldbus ».
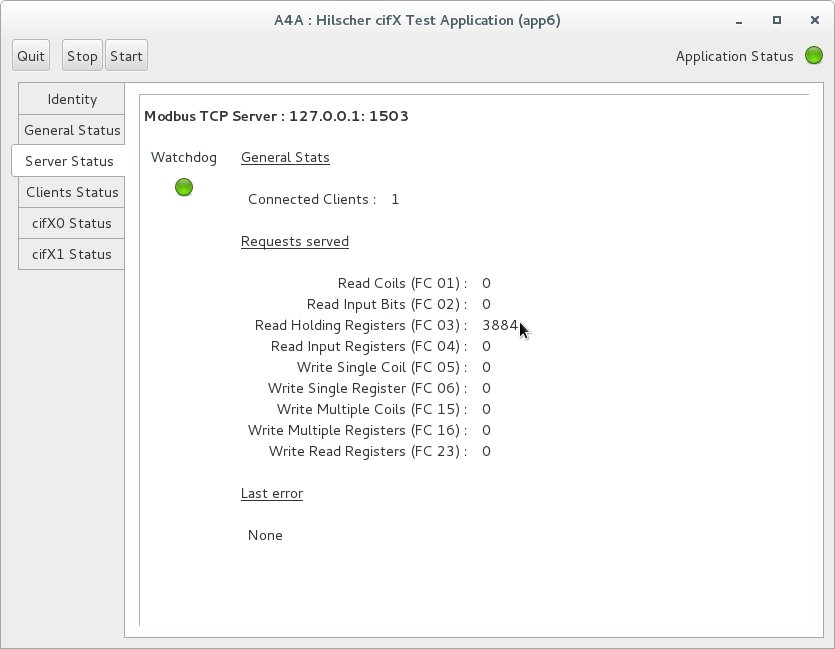
On trouve ensuite la vue d’état du serveur Modbus TCP qui affiche les compteurs de requêtes, et bien évidemment celui qui bouge est celui de la fonction 3 configurée côté Modbus Poll :
La vue « Client Modbus TCP » affiche les informations d’état concernant les deux requêtes configurées pour le serveur secret pour le moment, le second client étant désactivé :
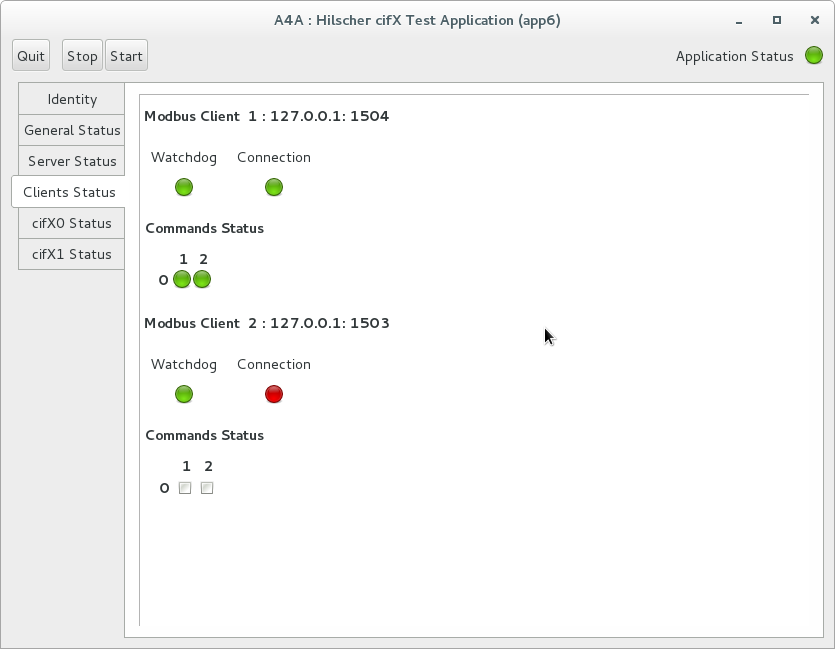
Notez que lorsque l’on rajoute des requêtes au niveau de la configuration des clients, la vue d’état est bien sûr adaptée automatiquement.
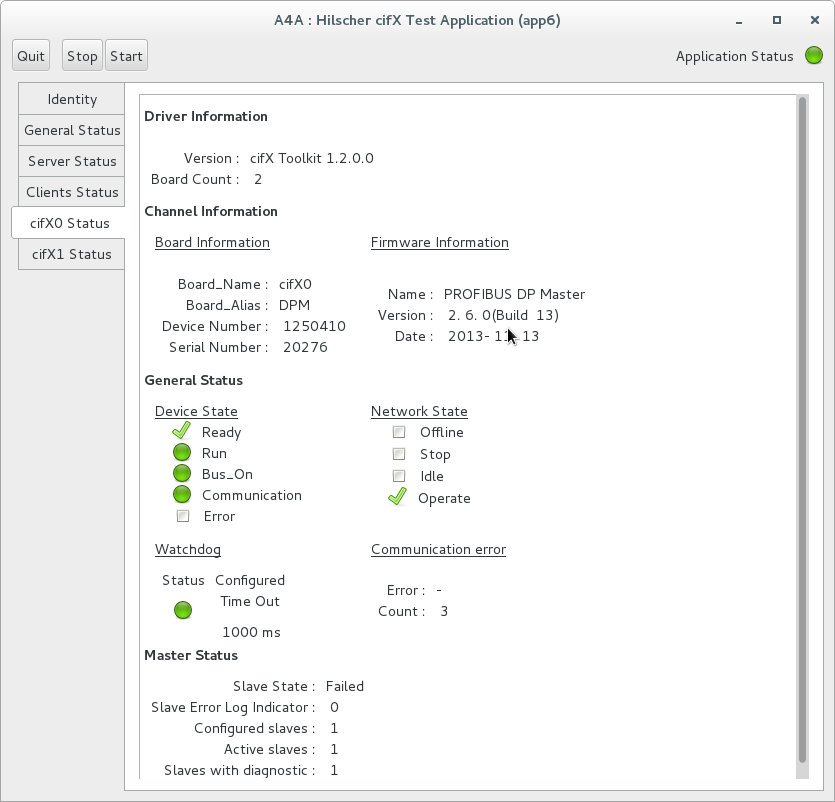
Puis viennent les deux vues d’état des canaux Hilscher cifX.
L’un est donc PROFIBUS DP Maître :
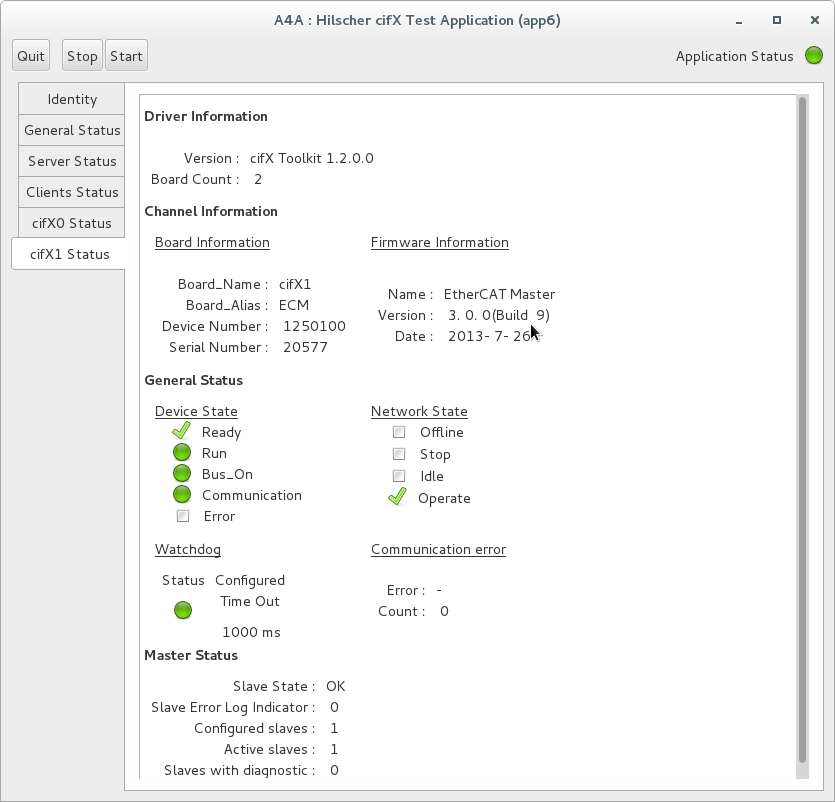
Et l’autre est EtherCAT Maître :
Le programme utilisateur à l’œuvre dans les trois tâches est très sensiblement identique :
Elapsed_TON_1 : Ada.Real_Time.Time_Span;
begin
if First_Cycle then
Output_Byte := Pattern_Byte;
First_Cycle := False;
end if;
Tempo_TON_1.Cyclic (Start => not TON_1_Q,
Preset => Ada.Real_Time.Milliseconds (500),
Elapsed => Elapsed_TON_1,
Q => TON_1_Q);
if TON_1_Q then
case Cmd_Byte is
when 0 =>
Output_Byte := ROR (Value => Output_Byte, Amount => 1);
when 1 =>
Output_Byte := ROL (Value => Output_Byte, Amount => 1);
when others => Output_Byte := Pattern_Byte;
end case;
end if;
end Process_IO;
On trouve aussi dans « Ada for Automation » une application exemple 5, « app5 », identique à « app6 » mais qui ne gère elle qu’un seul canal Hilscher cifX.
Mais quel est donc ce serveur Modbus TCP secret dont je vous entretiens depuis le début ?
La NXIO 500-RE ne pourrait-elle faire l’affaire avec une MMC ad hoc ? Sans doute, mais pour des raisons qui m’échappent ce firmware n’existe pas…
Aussi, je me suis dit que je n’avais qu’à utiliser le « kernel 0 », issu de « app1simu », et qui fournit un serveur Modbus TCP.
Oui mais, et les boutons et LEDs ? GtkAda aurait bien sûr pu convenir mais comme je jouais avec Gnoga…
Taa taan ! Voilà un « piano » piloté depuis le navigateur !
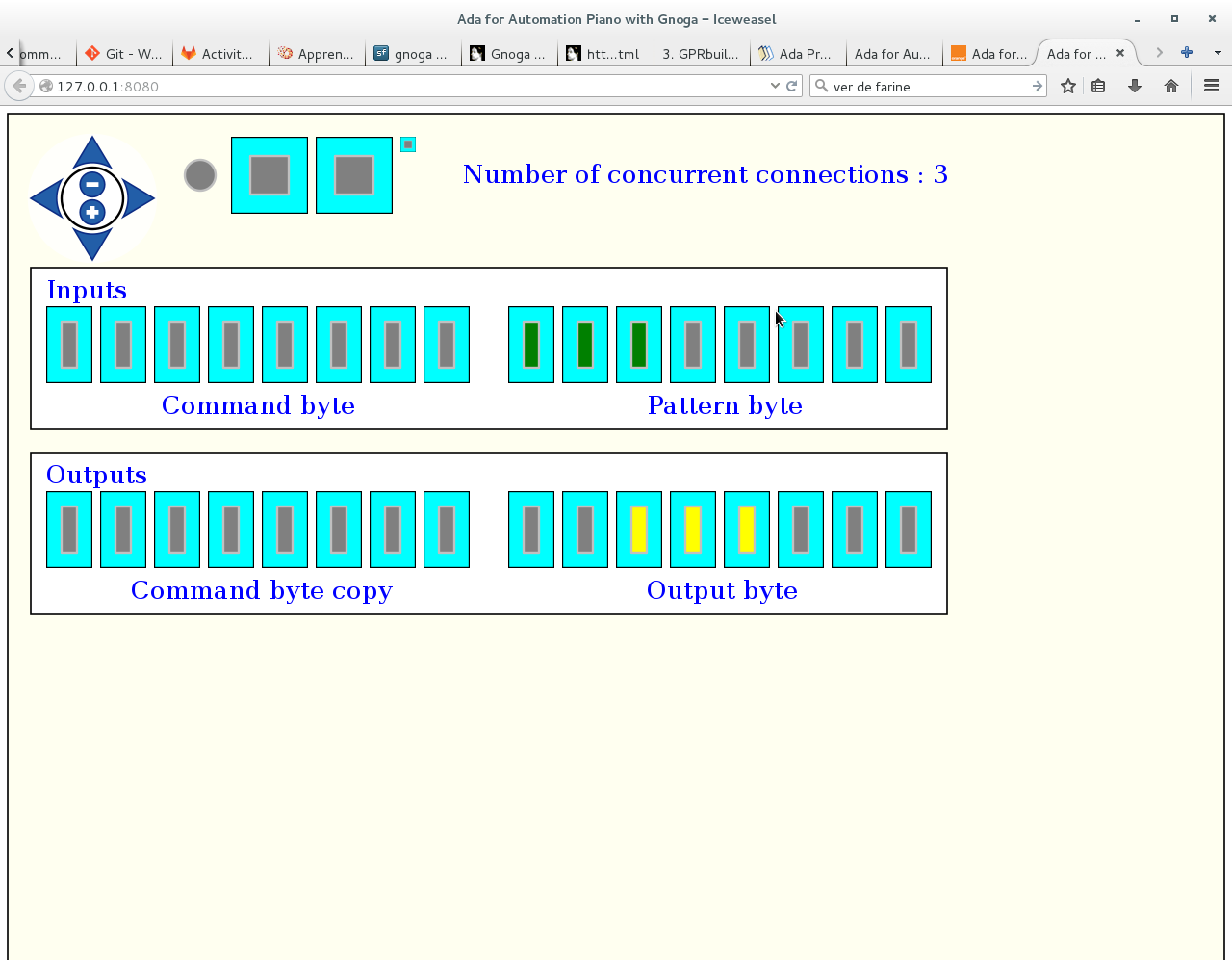
Comme c’est du SVG, donc du vectoriel, même depuis un mobile ça se pilote.
Et en plus l’application supporte les connexions multiples ! On peut jouer à plusieurs ! J’adore…
Promis, dès que mon code est un peu plus propre je l’envoie sur le dépôt.
Cordialement,
Stéphane