Bonjour,
Si votre installation comporte des automates Siemens S7, vous êtes bien en peine de discuter selon le protocole Modbus bien que cela soit possible. Et vous vous demandez comment réaliser vous aussi un superbe tableau de bord pour votre automate comme celui exposé ici.
C’est très possible et nous allons pouvoir avec Node-RED mettre en œuvre de nouveaux nœuds permettant la communication S7 via ISO on TCP / RFC 1006 :
https://flows.nodered.org/node/node-red-contrib-s7comm
Ces nœuds ont été développés par Hilscher :
https://github.com/Hilscher/node-red-contrib-s7comm
sur la base de l’excellent travail de ce projet :
https://github.com/plcpeople/nodeS7
Vous voudrez bien consulter la littérature fournie par ces projets pour plus d’information.
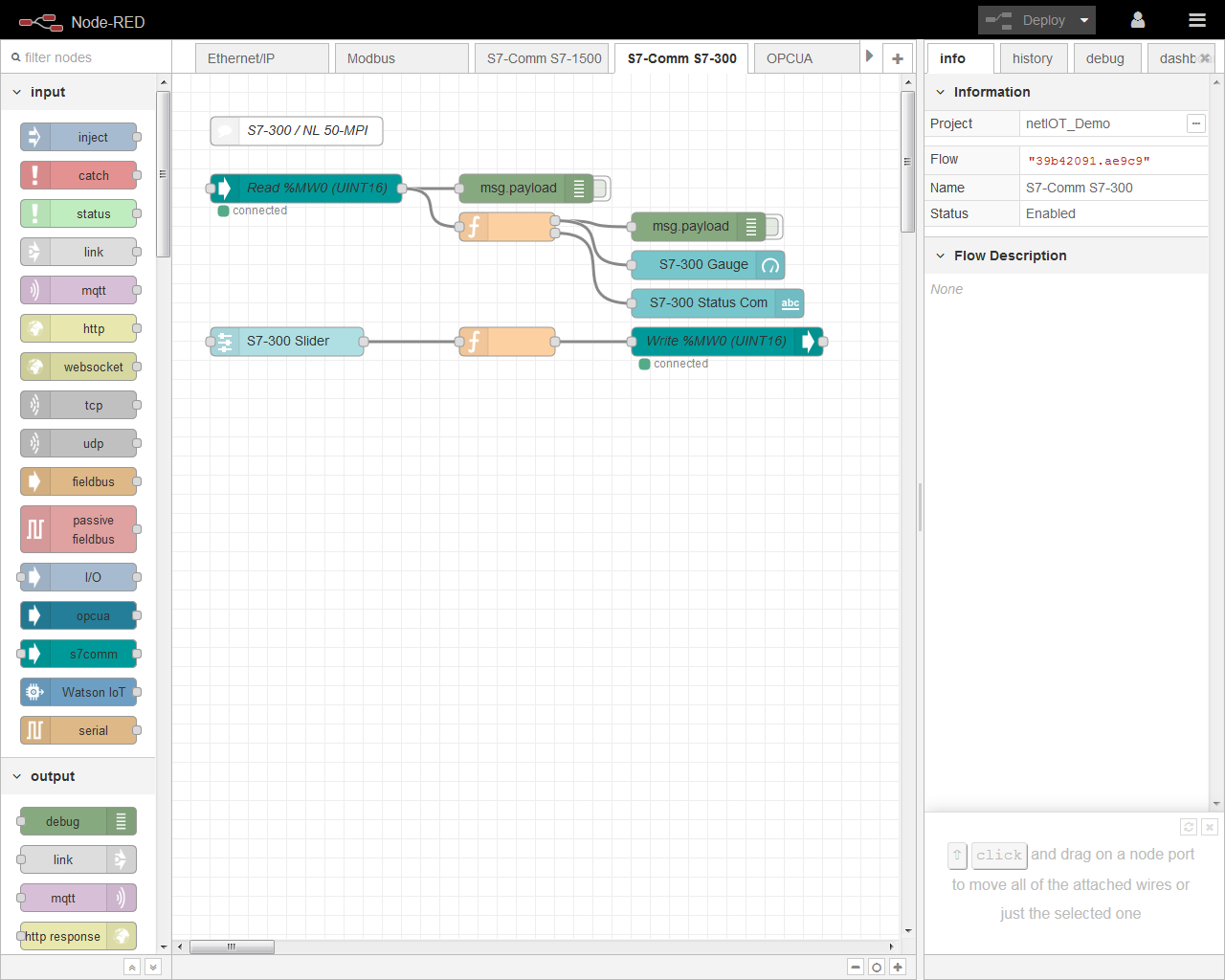
Disposant d’une CPU Siemens S7-1500 PN j’ai donc pu tester ces blocs et j’ai créé ce « flow » que je partage :

Le « flow » exporté est ici :
Node-RED-S7-1500-RFC1006-0
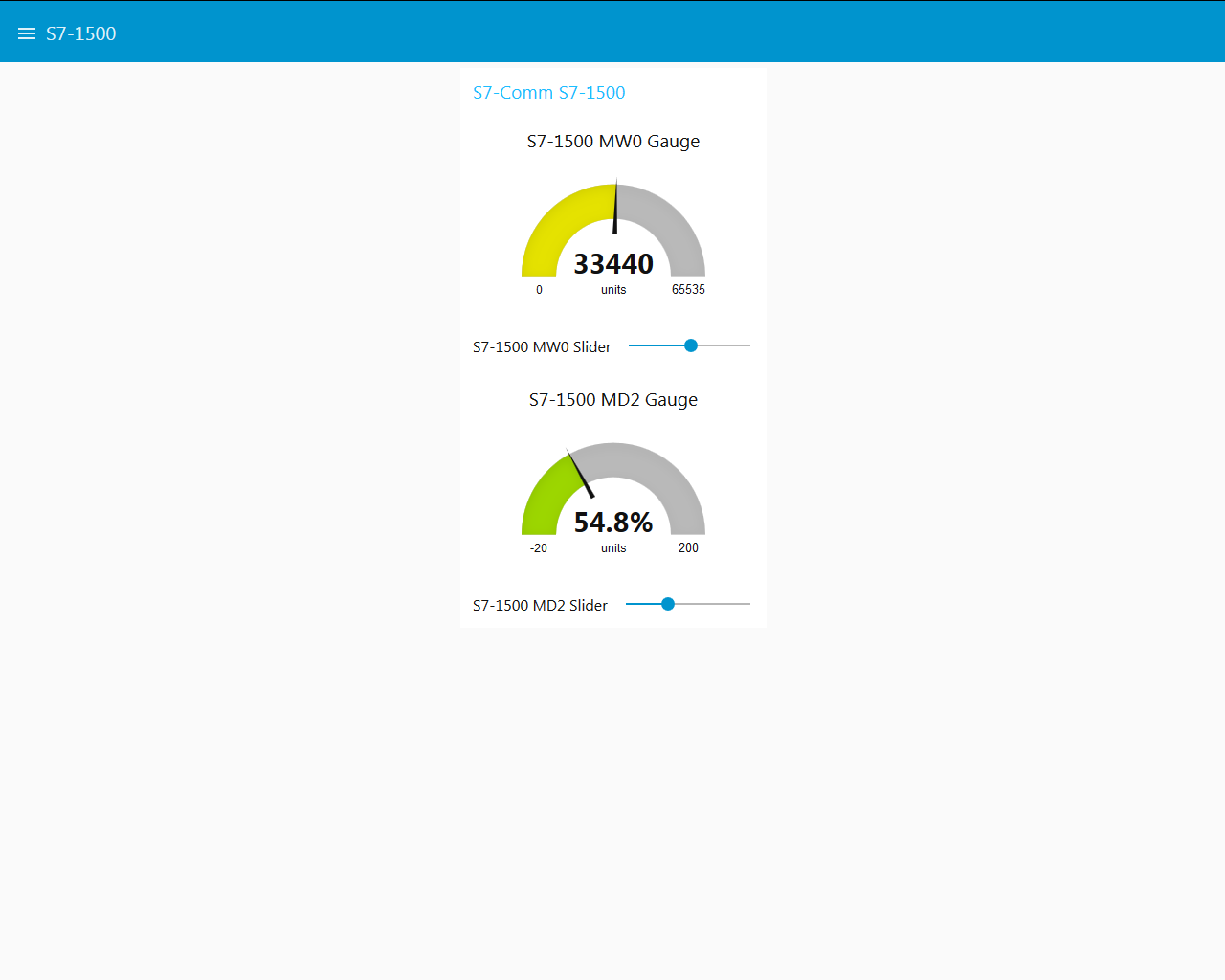
Il réalise la lecture du %MW0, sa mise en forme et l’affichage dans une jauge.
L’état de la communication est également affiché.
Un potentiomètre permet de régler une valeur écrite dans ce même %MW0, ce qui suffit à ma démonstration.
Le code de la fonction est très simple. On récupère sur une sortie la valeur qui nous intéresse et l’on teste l’état de la communication que l’on retourne sur la seconde sortie.
var msg_com = {payload:(msg.payload.error === 0)};
return [msg_out, msg_com];
Les nœuds peuvent accéder en lecture et écriture aux différentes zones mémoire de l’automate (entrée, sortie, mémento, blocs de données, tempo et compteurs) et tous les types de données élémentaires, aussi les chaines de caractères S7, sont supportés.
Ainsi le « flow » montre l’exemple du réel %MD2. La valeur est aussi envoyée vers un autre « flow » connecté à une base de données « InfluxDB » mais c’est une autre histoire que je vous raconterai ce tantôt.
Et voici un beau tableau de bord pour votre S7-1500 :
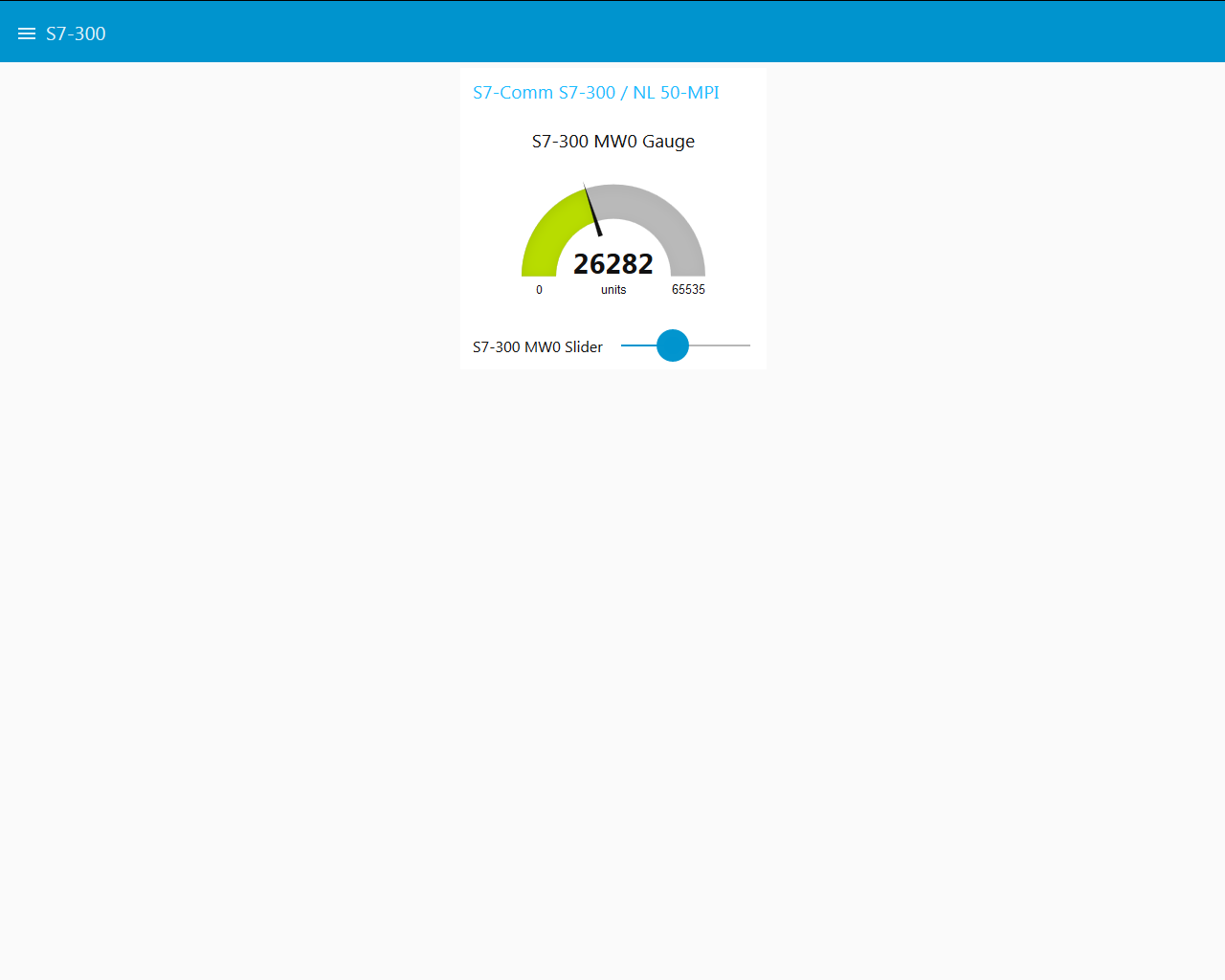
Si votre CPU ne possède pas de connexion TCP/IP, rien n’est perdu !
En effet, vous pouvez lui adjoindre un NL 50-MPI (ou un NT 50-MPI) connecté sur le port MPI ou PROFIBUS.
Ces passerelles ont déjà fait l’objet de plusieurs articles.
Ainsi je peux faire la même chose avec ma CPU Siemens S7 315-2DP :
Les nœuds Node-RED S7-Comm sont installés par défaut dans toutes les passerelles de la gamme netIOT Edge.
Ces équipements industriels iront très bien à côté de votre CPU Siemens ! 😉
Cordialement,
Stéphane