Bonjour,
L’article précédent montrait la réalisation d’un tableau de bord pour un serveur Modbus TCP un peu particulier avec Node-RED.
Il est bien sûr possible d’appliquer ces mêmes technologies pour créer un tableau de bord quel que soit le serveur Modbus TCP ou l’esclave Modbus RTU.
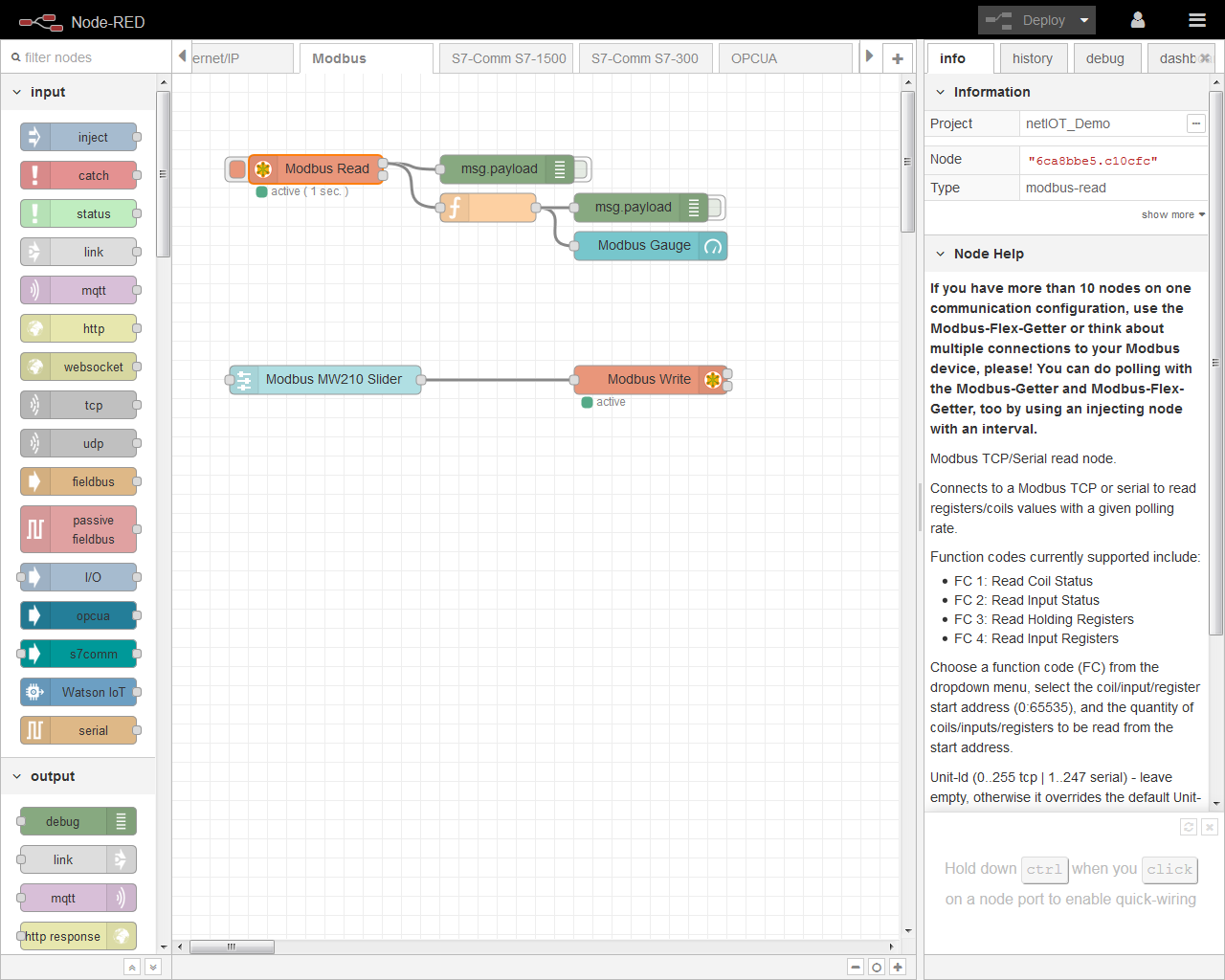
En l’occurrence, j’ai à ma disposition un automate M340 de SCHNEIDER ELECTRIC, muni d’un coupleur NOC04101, et qui possède, entre autres, la fonctionnalité serveur Modbus TCP et le « flow » ci-après réalise les opérations suivantes :
D’une part, on lit et on affiche dans une jauge la valeur du %MW200.
On trouve donc les nœuds suivants :
- un nœud qui effectue la lecture du %MW200, fonction FC3, lecture de registres internes,
- un autre, l’extraction et la mise en forme de la donnée pour la jauge,
- et la jauge elle-même.
D’autre part, un potentiomètre permet de régler la valeur du %MW210.
Il y a ainsi :
- le nœud du potentiomètre,
- et celui réalise l’écriture du %MW210, FC6, écriture d’un registre interne.
Le code de la fonction d’extraction est très simple, la requête FC3 remonte un tableau de données et l’on ne s’intéresse qu’à la première :
return msg_out;
Le programme automate se contente de recopier la valeur du %MW210 dans le %MW200 pour les besoins de ma démonstration.
{
"id": "43e491b2.0b35a8",
"type": "tab",
"label": "Modbus",
"disabled": false,
"info": ""
},
{
"id": "6ca8bbe5.c10cfc",
"type": "modbus-read",
"z": "43e491b2.0b35a8",
"name": "",
"topic": "",
"showStatusActivities": false,
"showErrors": false,
"unitid": "",
"dataType": "HoldingRegister",
"adr": "200",
"quantity": "1",
"rate": "1",
"rateUnit": "s",
"delayOnStart": false,
"startDelayTime": "",
"server": "43c0221.3e519dc",
"x": 150,
"y": 100,
"wires": [
[
"d1453b66.31e57",
"74b2d916.437c08"
],
[]
]
},
{
"id": "d1453b66.31e57",
"type": "debug",
"z": "43e491b2.0b35a8",
"name": "",
"active": false,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 350,
"y": 100,
"wires": []
},
{
"id": "35d64d2a.3a0dfa",
"type": "ui_gauge",
"z": "43e491b2.0b35a8",
"name": "Modbus Gauge",
"group": "338d75bf.8d7ca2",
"order": 1,
"width": 0,
"height": 0,
"gtype": "gage",
"title": "MW200 Gauge",
"label": "units",
"format": "{{value}}",
"min": 0,
"max": "65535",
"colors": [
"#00b500",
"#e6e600",
"#ca3838"
],
"seg1": "",
"seg2": "",
"x": 500,
"y": 180,
"wires": []
},
{
"id": "74b2d916.437c08",
"type": "function",
"z": "43e491b2.0b35a8",
"name": "",
"func": "var msg_out = {payload:msg.payload[0]};\nreturn msg_out;",
"outputs": 1,
"noerr": 0,
"x": 330,
"y": 140,
"wires": [
[
"35d64d2a.3a0dfa",
"de0996f0.d1aef"
]
]
},
{
"id": "de0996f0.d1aef",
"type": "debug",
"z": "43e491b2.0b35a8",
"name": "",
"active": false,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 490,
"y": 140,
"wires": []
},
{
"id": "82cf117c.244d88",
"type": "modbus-write",
"z": "43e491b2.0b35a8",
"name": "",
"showStatusActivities": false,
"showErrors": false,
"unitid": "",
"dataType": "HoldingRegister",
"adr": "210",
"quantity": "1",
"server": "43c0221.3e519dc",
"x": 500,
"y": 320,
"wires": [
[],
[]
]
},
{
"id": "7fad2d38.5ba184",
"type": "ui_slider",
"z": "43e491b2.0b35a8",
"name": "Modbus MW210 Slider",
"label": "MW210 Slider",
"group": "338d75bf.8d7ca2",
"order": 0,
"width": 0,
"height": 0,
"passthru": true,
"topic": "",
"min": 0,
"max": "65535",
"step": 1,
"x": 160,
"y": 320,
"wires": [
[
"82cf117c.244d88"
]
]
},
{
"id": "43c0221.3e519dc",
"type": "modbus-client",
"z": "43e491b2.0b35a8",
"name": "M340",
"clienttype": "tcp",
"bufferCommands": true,
"stateLogEnabled": false,
"tcpHost": "192.168.1.100",
"tcpPort": "502",
"tcpType": "DEFAULT",
"serialPort": "/dev/ttyUSB",
"serialType": "RTU-BUFFERD",
"serialBaudrate": "9600",
"serialDatabits": "8",
"serialStopbits": "1",
"serialParity": "none",
"serialConnectionDelay": "100",
"unit_id": 1,
"commandDelay": 1,
"clientTimeout": 1000,
"reconnectTimeout": 2000
},
{
"id": "338d75bf.8d7ca2",
"type": "ui_group",
"z": "43e491b2.0b35a8",
"name": "Modbus",
"tab": "52e4f040.d2daf",
"order": 1,
"disp": true,
"width": "6"
},
{
"id": "52e4f040.d2daf",
"type": "ui_tab",
"z": "43e491b2.0b35a8",
"name": "Modbus",
"icon": "dashboard",
"order": 3
}
]
Le code du flow est disponible ici :
Node-RED-M340-OMB0
Et le tableau de bord résultant ressemble à ceci :
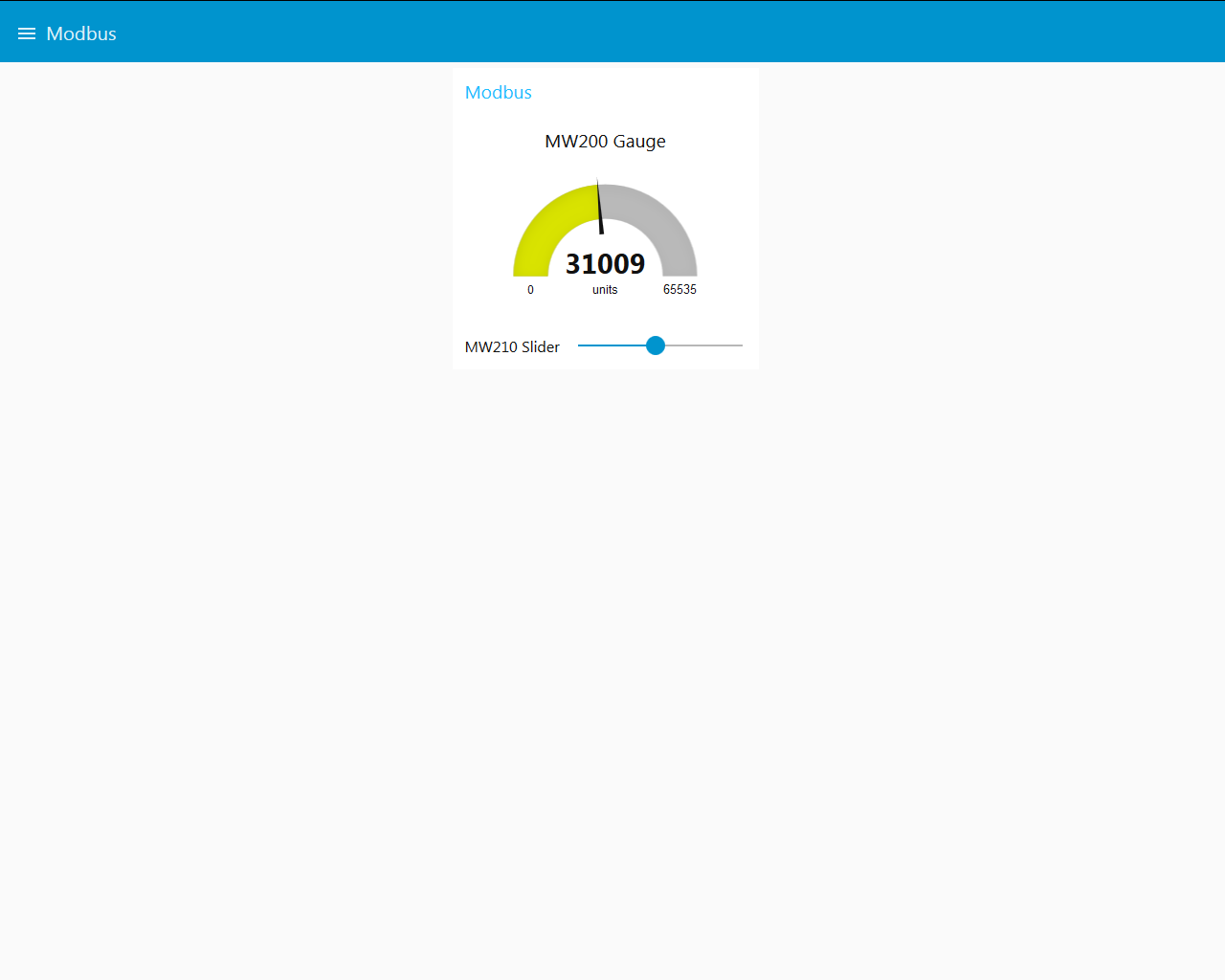
Je suis certain que vous voyez déjà toutes les opportunités qui s’offrent à vous pour un investissement somme toute modique.
Avec un œil sur votre automate depuis n’importe quel navigateur, de votre bureau ou sur votre mobile, vous pourrez vous consacrer à d’autres tâches comme apprendre Ada 😉 :
https://learn.adacore.com/index.html#
Bien sûr, lorsque vous vous serez fait la main sur votre Raspberry Pi, vous pourrez compter sur une version industrialisée de celui ci comme le netPI CORE 3 :
https://www.hilscher.com/products/product-groups/industrial-internet-industry-40/netiot-edge/niot-e-npi3-en/
Cordialement,
Stéphane